
Основы П.Л Чебышева в теории механизмов
Содержание:

Биография П.Л. Чебышева
Пафнутий Львович родился в 1821 году, в имении матери своей, селе Окатове Калужской губернии, Боровского уезда. Получив дома первоначальное образование, многообещавший юноша, не побывав ни в одном из средних учебных заведений, выдержал экзамен прямо в московский университет.
Поступив в 1837 году на физико-математический факультет, Чебышев сразу обратил на себя внимание известного профессора Брашмана, который угадал в новом ученике своем будущее математическое светило, а потому начал старательно руководить его занятиями.
Окончив кандидатом курс в университете, в 1841 году, Чебышев, под руководством Брашмана, отдается всецело своим ученым трудам и упорно не покидает их в течение семи лет. Первое научное исследование математика вышло на французском языке, в 1845 году, и носит название "Sur des integrales definies". В следующем за тем году, для получения степени магистра, написал он диссертацию: "О теории вероятности", которую защищал в Москве, где и удостоен был вышеназванной ученой степени. В 1847 году Пафнутий Львович допущен был к защите диссертации "Об интегрировании иррациональных дифференциалов".
В 1847 году Чебышев утверждён в звании доцента и начинает читать лекции по алгебре и теории чисел в Петербургском университете, а уже в 1849 году Пафнутий Львович приобрел докторскую степень. Эту должность он занимал до старости.
Особенная заслуга Чебышева как университетского преподавателя состоит, по общим отзывам учеников его, в том, что он умел пробуждать в своих слушателях любовь к математическим исследованиям и руководить ими в научных занятиях. Ему обязана Россия образованием многих своих ученых в европейском смысле. Все молодые и сильные дарования по математике, которыми так богат был с шестидесятых годов Петербургский университет, получили развитие свое под руководством маститого профессора. Многие ученики его занимают, в настоящее время, кафедры в других русских университетах и служат науке учеными своими исследованиями.
В 1849 году Пафнутий Львович приобрел докторскую степень Петербургского университета. В 1853 году он получил звание экстраординарного профессора Петербургского университета и выбран был, независимо от этого, в адъюнкты Академии Наук.
В 1857 году Чебышев получил звание ординарного профессора и усердно предался изучению механики, в области которой ему вскоре пришлось совершить массу полезных открытий. Лучшие его мемуары по механике следующие: 1) "О механических параллелограммах", 2) "О центробежных уравнителях", 3) "О зубчатых колесах" и другие. В 1859 году математик был выбран Академией Наук в ординарные академики по прикладной математике. В 1865 г. Берлинская академия избрала его своим членом-корреспондентом, а в 1874 году Парижская академия наук почтила его избранием в свои члены (associes), и таким образом Пафнутий Львович был первым русским ученым, удостоенным чести быть причисленным к составу членов французского института.
Лондонское королевское общество также избрало Чебышева своим членом. Из математических трудов Пафнутия Львовича в последние пятнадцать лет особенно выдаются его мемуары: "О функциях наиближе подходящих к нулю", "О разложении в ряды", "О наибольших и наименьших" и многие другие.
8 декабря 1894 года утром Пафнутий Львович Чебышев умер, сидя за письменным столом. Накануне был его приёмный день, и он сообщал ученикам планы своих работ и наводил их на мысли о темах для самостоятельного творчества.
Основные научные достижения
В своих произведениях Чебышев употреблял совершенно новые приемы для математических исследований, и посредством этих, до него неизвестных, приемов начал достигать тех счастливых и блистательных результатов, которые обессмертили его имя. Многочисленные труды, которые принесли Чебышеву известность в Европе и Америке, помещены им в изданиях академии наук и в математических журналах: Лиувилля (французском) и Крелле (немецком). Отдельными книгами на русском языке изданы: "Опыты элементарного анализа теории вероятностей" и "Теория сравнений". Для университетского акта 1856 года Пафнутий Львович написал трактат "О черчении географических карт", вскоре после того изданный в Париже на французском языке. Математические произведения нашего ученого отличаются своеобразностью приемов и разработкой таких вопросов, решение которых ранее либо вовсе не затрагивалось, либо представляло такие затруднения, которые не могли быть преодолены даже первостепенными геометрами. Особенные заслуги оказаны им преимущественно:
Отысканием пределов для числа, показывающего, сколько имеется простых чисел между двумя данными целыми числами: этим Чебышев сделал первый и решительный шаг к решению одного из труднейших вопросов теории чисел.
Определением условий, при которых интеграл алгебраической функции, содержащей радикал, выразим алгебраически или логарифмически: эти разъяснения Чебышева значительно дополняют те, которыми занимался гениальный Абель.
Изложением общей теории механизмов, известных под названием параллелограммов, представляющей особенно интерес решением аналитического вопроса: "найти тот вид изменения приблизительного значения данной функции, разложенной в ряд по степеням, приращения переменной, при которых погрешность, заключающаяся между двумя данными пределами, будет наименьшей".
Изложением общего способа для решения вопросов подобного рода, т. е. нахождения вообще приблизительных выражений, которые давали бы для данной функции значение, поближе подходящее к истинному в данных пределах.
Исследованием о непрерывных дробях, раскрывающим новое и важное значение этих дробей, при расположении функций в ряды.
Интегрированием по способу наименьших квадратов, представляющему преимущество перед другими способами интегрирования в том отношении, что при удобстве вычисления, дает наиболее выгодное соединение результатов наблюдений.
Изысканием наибольших и наименьших сумм, составленных из значений целой функции и ее производных, — содержащим начало совершенно нового рода математического исчисления, сходного с вариационным.
Открытием остроумного механизма, заменяющего параллелограмм Витта и наиболее удовлетворяющего условию, необходимому для преобразования прямолинейного движения во вращательное.
Так же, как член военно-ученого комитета, Пафнутий Львович занимался различными предметами, относящимися к артиллерии, и в 1858 году производил опыты над стрельбой цилиндро-коническими ядрами особого вида.
Наиболее оригинальными, как по сущности вопроса, так и по методу решения, являются работы Чебышева «О функциях, наименее уклоняющихся от нуля». Важнейший из этих мемуаров — мемуар 1857 года под названием «Sur les questions de minima qui se rattachent à la représentation approximative des fonctions» (в «Мем. Акад. Наук»). Профессор Клейн в своих лекциях, прочитанных в Гёттингенском университете в 1901 году, называл этот мемуар «удивительным» (wunderbar). Его содержание вошло в классическое сочинение I. Bertrand Traité du Calcul diff. et integral. В связи с этими же вопросами находится и работа Чебышева «О черчении географических карт». Этот цикл работ считается основанием теории приближений. В связи с вопросами «о функциях, наименее уклоняющихся от нуля», находятся и работы Чебышева по практической механике, которой он занимался много и с большой любовью.
Следует отметить, что для самого Пафнутия Львовича интерес к практике оказался чрезвычайно плодотворным, так как многие его математические открытия были сделаны при решении прикладных задач. Так, например, изучение шарнирного механизма, известного под названием "параллелограмм Уатта", привело его к созданию основ теории наилучшего приближения функций многочленами, которая сейчас превратилась в широко развитую математическую область, имеющую большое прикладное значение…
В теории вероятностей Чебышеву удалось необычайно простыми средствами получить ряд весьма важных результатов. Многие результаты и выводы были только намечены, не доведены до конца, но все работы Чебышева в этой области явились той базой, на которой развилась русская школа теории вероятностей.
Выдающееся значение для науки имели исследования П. Л. Чебышева в теории чисел. Впервые после Евклида удивительно остроумными и удивительно элементарными рассуждениями он получил важнейшие результаты в задачи о распределении простых чисел в работах "Об определении числа простых чисел, не превосходящих данной величины" и "О простых числах".
Одной из наук, которой Пафнутий Львович интересовался всю жизнь, была теория механизмов и машин, причем Чебышев занимался не только теоретическими изысканиями в этой области, но и уделял большое внимание непосредственному конструированию конкретных механизмов.
Задолго до того, как советский "Луноход-1" проложил первую трассу на лунной поверхности, фантасты и ученые рассматривали различные варианты машин, которым будет суждено передвигаться по другим планетам. Большинство проектов сводилось к некоторому шагающему механизму. П. Л. Чебышев разработал вариант стопоходящей машины, имитирующей движение животного при ходьбе.
Много внимания уделял Чебышев вопросам народного образования, принимая активное участие в Ученом комитете
Министерства просвещения.
Труды ученого, его научная, педагогическая и просветительская деятельность, основанная им знаменитая Петербургская математическая школа, сыграли исключительно большую роль в развитии отечественной математики и механики. В 1944 году Академия наук СССР учредила премии имени П. Л. Чебышева за лучшие исследования в области математики и теории механизмов и машин.
Решение П. Л. Чебышевым проблемы синтеза (проектирования) механизмов
Задачи теории машин и механизмов очень разнообразны, но важнейшие из них можно сгруппировать по трём разделам: синтез механизмов, динамика машин и механизмов и теория машин-автоматов.
Та часть проектирования машин, которая относится к выбору схемы и нахождению параметров этой схемы, обеспечивающих выполнение требуемых движений.
Задачи динамики механизмов состоят в исследовании движения отдельных частей (звеньев) механизма под действием внешних сил.
Рассматривает методы построения их схем по условиям согласованности работы отдельных механизмов и достижения оптимальной производительности, точности и надёжности машин-автоматов.
Разделение задач теории машин и механизмов на указанные три раздела в некоторой мере условное. Например, в синтезе механизмов учитываются не только кинематические, но и динамические условия; в динамике механизмов на основе исследования движения звеньев механизма даются рекомендации по выбору параметров механизма из условий получения оптимальных динамических характеристик, то есть выполняется динамический синтез; в теории машин-автоматов выбор исполнительных механизмов и их параметров основывается на методах синтеза механизмов, а критерии оптимальности схемы машины-автомата (в особенности схемы управления) часто определяются по динамическим показателям. Однако обзор проблем науки о машинах и механизмах по этим разделам даёт достаточно полное представление о её содержании.
Основы синтеза механизмов в его аналитической форме были заложены П.Л.Чебышевым в 19 веке. Исследуя его работы, можно представить всю последовательность решения задач синтеза механизмов в виде трёх этапов.
Первый этап — выбор основного критерия синтеза и ограничивающих условий. Каждый механизм в зависимости от назначения и условий эксплуатации должен удовлетворять ряду требований, разнообразных по форме и содержанию. Некоторые из этих требований могут быть даже противоречивыми. Однако всегда можно установить, какое требование является решающим для правильной работы механизма, и в соответствии с этим выбрать основной критерий, по которому оценивается его качество. Основной критерий синтеза является функцией параметров механизма (называется также функцией-критерием, или целевой функцией), остальные требования к нему формулируются в виде ограничивающих условий на параметры. Другими словами, первый этап решения любой задачи синтеза — этап, на котором происходит формализация требований, предъявляемых к нему. На этом этапе задачи технологические и конструктивные превращаются в математические.
Второй этап — установление аналитического выражения функции, характеризующей величину основного критерия синтеза. Выбор основного критерия определяется назначением механизма. Для некоторых механизмов его аналитическое выражение может оказаться очень сложным. Между тем существуют функции, которые имеют более простой вид и в то же время с достаточной для практики точностью характеризуют величину основного критерия. При этом необходимо только, чтобы погрешности от замены функции-критерия её приближённым выражением были меньше тех погрешностей, которые возникают в реальном механизме из-за неточностей изготовления его деталей, упругости звеньев и других причин.
Третий этап — вычисление постоянных параметров механизма из условий оптимизации основного критерия с учётом ограничивающих условий (ограничений). В одних случаях эти условия выражаются в виде одного или нескольких уравнений и системы неравенств, из которых непосредственно находятся искомые параметры (точный синтез). В других случаях отыскиваются такие значения параметров, при которых отклонение функции-критерия от оптимального значения является достаточно малой величиной, удовлетворяющей условиям практического использования механизма (приближённый синтез). Для приближённого синтеза Чебышев предложил оригинальный метод вычисления искомых параметров механизма, который привёл в дальнейшем к созданию математической теории приближения функций.
Структурная формула П.Л. Чебышева для плоских механизмов
Рассмотрим теперь, какие же связи и в каком количестве могут быть наложены на относительные движения звеньев кинематической пары.
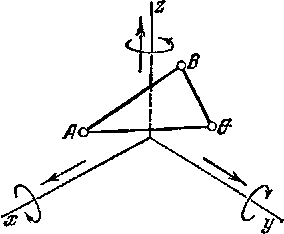
Рисунок 1
Как известно, в общем случае всякое свободно движущееся в пространстве абсолютно твердое тело (рис. 1), положение которого определяется тремя произвольно выбранными точками А, В и С, обладает шестью степенями свободы. В самом деле, положение твердого тела в пространстве фиксируется координатами трех его точек А, В и С, т. е. девять
координатами: (хА, уА, zA ), (хв, yв, zв) и (хс, ус, zc). Между собой эти координаты связаны тремя условиями постоянства расстояний: А В, ВС, СА. Таким образом, число независимых параметров, определяющих положение твердого тела в пространстве, равно шести и тело обладает шестью степенями свободы. Движение такого тела может быть всегда представлено как вращение вокруг и перемещение вдоль трех произвольно выбранных взаимно перпендикулярных осей x, у и z.
Таким образом, в общем случае, твердое тело обладает в пространстве шестью видами независимых возможных движений: тремя вращениями вокруг осей x, у, z и тремя поступательными движениями вдоль тех же осей. Поэтому, если бы на движение первого звена кинематической пары, принятого за абсолютно твердое тело, не было наложено никаких условий связи, движение такого звена могло бы быть представлено состоящим из шести вышеуказанных движений относительно выбранной системы координат xyz, связанной со вторым звеном.»1
Вхождение звена в кинематическую пару с другим звеном налагает на относительные движения этих звеньев условия связи. Очевидно, что число этих условий связи может быть только целым и должно быть меньше шести, так как уже в том случае, когда число условий связи равняется шести, звенья теряют относительную подвижность и кинематическая пара переходит в жесткое соединение двух звеньев. Точно так же число условий связи не может быть меньшим единицы, ибо в том случае, когда число условий связи равно нулю, звенья не соприкасаются, и, следовательно, кинематическая пара перестает существовать; в таком случае мы имеем два тела, движущиеся в пространстве одно независимо от другого.
Итак, число условий связи S, наложенных на относительное движение каждого звена кинематической пары, может располагаться в пределах от 1 до 5, т. е. 1 < S < 5. Следовательно, число степеней свободы W звена кинематической пары в относительном движении может быть выражено зависимостью
W = 6 — S (1)
Классификация кинематических пар проводится по числу наложенных связей:
S=1, W=5 – кинематическая пара 1 класса
S=2, W=4 – кинематическая пара 2 класса
S=3, W=3 – кинематическая пара 3 класса
S=4, W=2 – кинематическая пара 4 класса
S=5, W=1 – кинематическая пара 5 класса
Из равенства (1) следует, что число степеней свободы звена кинематической пары в относительном движении может изменяться также от 1 до 5.
Структура механизма
Механизмом также называется такая кинематическая цепь, в которой при заданном движении одного или нескольких звеньев относительно любого из них все остальные звенья совершают однозначно определяемые движения.
Как видно из этого определения, в любом механизме есть звено (или несколько звеньев), движение которого является заданным. Звено (звенья) механизма, которому сообщается движение, преобразуемое в требуемое движение других звеньев механизма, называется входным звеном (входными звеньями). Звено (звенья) механизма, совершающее требуемое движение, для которого предназначен механизм, называется выходным звеном (выходными звеньями).
Для сокращения входное звено заменяется термином «вход », а выходное звено — термином «выход».
Остальные подвижные звенья механизма называются соединительными или промежуточными.
В некоторых случаях принимают термин ведущее звено(звенья). Ведущим звеном называется звено, для которого сумма элементарных работ всех внешних сил, приложенных к нему, является положительной. Соответственно ведомым звеном называется звено, для которого сумма элементарных работ всех внешних сил, приложенных к нему, является отрицательной или равна нулю.
В большинстве случаев входное звено является и ведущим, но, конечно, могут быть случаи инверсии, когда входное звено становится ведомым.
Как это было указано выше, при кинематическом исследовании механизмов изучается их движение. Поэтому при изучении структуры и кинематики механизмов не обязательно в качестве входного звена выбирать то звено, к которому приложена внешняя сила, приводящая в движение механизм.
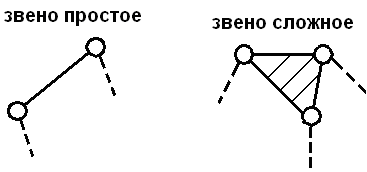
Таблицы классификации звеньев
По закону вращения звенья делятся на:
1. Кривошип- звено, имеющее общую кинематическую пару со стойкой и совершающее полный оборот вокруг своей оси.
2. Коромысло- звено, имеющее общую кинематическую пару со стойкой и не совершающее полный оборот вокруг своей оси.
3. Ползун- звено, имеющее общую кинематическую пару со стойкой и совершающее прямолинейное возвратно-поступательное движение.
4. Шатун- звено, не имеющее общих кинематических пар со стойкой и совершающее сложное плоскопараллельное движение.
5. Кулиса- звено, совершающее вращательное движение и несущее на себе другое звено, называемое кулисным камнем.
6. Кулисный камень
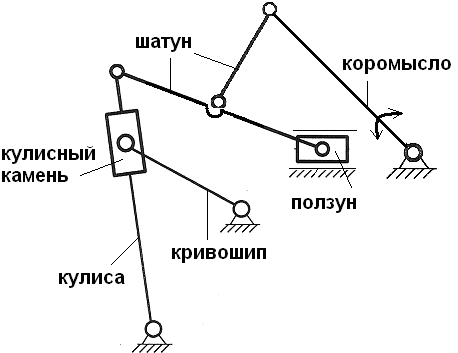
Рисунок 2
Звенья, соединенные с помощью кинематических пар, образуют кинематическую цепь.»2
замкнутая кинематическая цепь
 - Кинематическая цепь, присоединенная к стойке
- Кинематическая цепь, присоединенная к стойке
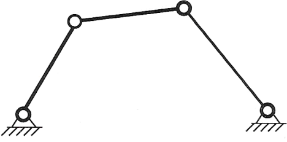 - Кинематическая цеп, присоединенная к двум стойкам
- Кинематическая цеп, присоединенная к двум стойкам
Структурная формула плоских механизмов
В общем случае число степеней свободы механизма W может быть определено по структурной формуле
W = 6n — 5p5 — 4 р4 — Зр3 — 2 р2 — p1,
где n - число подвижных звеньев;
6n- общее число степеней свободы всех звеньев;
p1, p2, p3, p4 , p5 – число кинематических пар от 1 до 5 класса;
W- степень подвижности механизма.
Применение этой формулы возможно только в том случае, если на движения звеньев, входящих в состав механизма, не наложено каких-либо общих дополнительных условий.
При рассмотрении плоских механизмов и составлении их структурных формул мы имеем в виду, что те степени свободы,которыми обладают звенья механизмов, и те условия связи, которые налагаются на движения звеньев вхождением их в кинематические пары, решают в совокупности вопрос об определенности движения механизма.
Необходимо отметить, что, кроме степеней свободы звеньев и связей, активно воздействующих на характер движения механизмов, в них могут встретиться степени свободы и условия связи, не оказывающие никакого влияния на характер движения механизма в целом. Удаление из механизмов звеньев и кинематических пар, которым эти степени свободы и условия связи принадлежат, может быть сделано без изменения общего характера движения механизма в целом. Такие степени свободы называются лишними степенями свободы, а связи — избыточными или пассивными связями.
В дальнейшем при изучении движения звеньев механизмов будем предполагать, что все лишние степени свободы и избыточные условия связи предварительно исключены из механизма удалением соответствующих звеньев, и будем учитывать в механизме только те связи и степени свободы, от которых зависит определенность его движения.
Структурная формула плоских механизмов в общем случае имеет следующий вид:
W = Зn — 2р5 — p4 (2)
Эта формула носит название формулы Чебышева.
Как видно из формулы (2), плоские механизмы могут быть образованы звеньями, входящими только в кинематические пары IV и V классов. Пары IV класса в плоских механизмах налагают одно условие связи на относительное движение ее звеньев. Пары V класса в плоских механизмах налагают два условия связи на относительное движение ее звеньев.
Из трех возможных относительных движений звеньев пар плоских механизмов вращательные и поступательные пары исключают по два движения. Вращательная пара исключает возможность поступательных движений вдоль двух осей, лежащих в плоскости движения звеньев. Поступательная пара исключает одно поступательное движение и одно вращательное (вокруг оси, перпендикулярной к плоскости движения звеньев).
В зависимости от числа W, стоящего в левой части формулы (2), мы можем получить плоские механизмы с одной, двумя, тремя и т. д. степенями свободы.
Формулы П.Л. Чебышева для механизма, превращающего качательное движение во вращательное
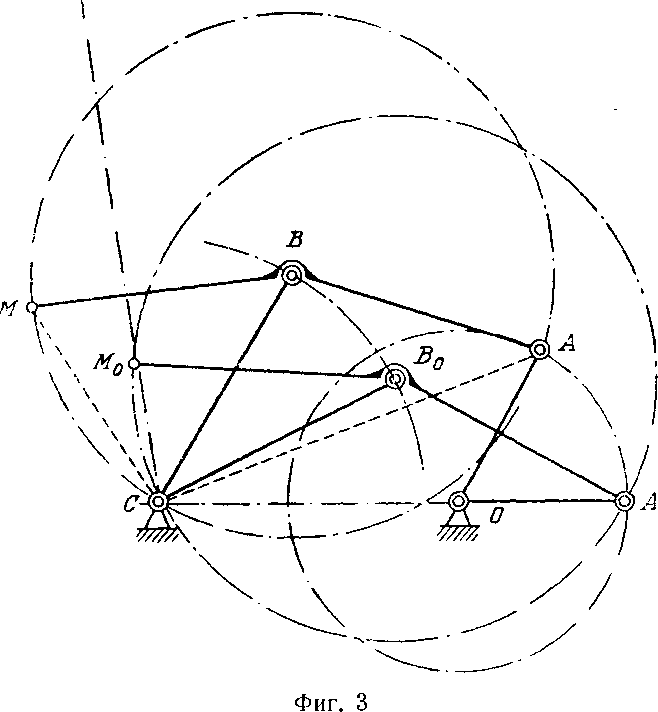
Рисунок 3
Для преобразования движения на плоскости простейшим средством представляется суставчатая система, составленная из линии, вращающейся около неподвижного центра, и линии, сочлененной с нею. Все точки первой линии могут двигаться только по концентрическим кругам; точки же второй линии могут двигаться по различным кривым, причем кривые, описываемые одновременно ее точками, значительно разнятся между собою по виду. Вследствие этого при движении одной из ее точек по какой-либо кривой в других точках ее получаются движения по кривым иного вида.
При таком преобразовании движения особенного внимания заслуживают точки второй линии, которых расстояния от оси сочленения ее с первою линией равны расстоянию этой оси от неподвижного центра вращения последней линии. Нетрудно показать, что при движении одной из таких точек по кривой, симметрической около оси, проходящей через неподвижный центр вращения, другая описывает кривую, имеющую то же свойство. Из этого видно, что всякая ломаная линия АВМ (рис 3), сочлененная с прямою ВС, вращающейся около неподвижного центра С, при равенстве АВ=ВМ=ВС,
доставляет средство преобразовывать движение по кривой, симметрической около оси, проходящей через центр С, в движение по кривой другого вида, имеющей то же свойство. Вид и положение последней кривой будет меняться при перемене угла АВМ и места центра вращения С, который, согласно вышесказанному, должен находиться на оси симметрии первой кривой.
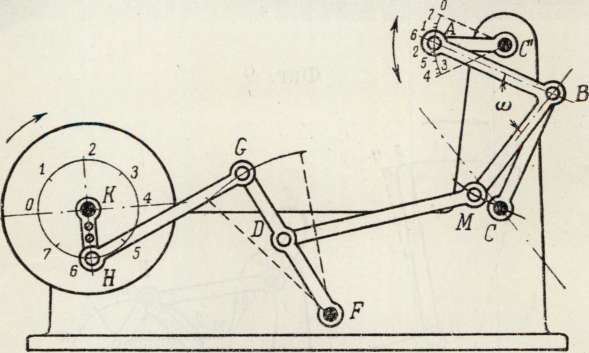
Рисунок 4
Преобразовывая таким образом движение точки А, когда она представляет конец радиуса OA (рис.4), вращающегося около центра О,мы получаем суставчатую систему, в которой точка М описывает кривую, симметрическую около оси, проходящей через центр С. Если при этом расстояние центров С, О превосходит длину радиуса ОА, для него возможно сделать полный оборот около центра О, по окончании которого точка М возвращается на свое первоначальное место, описав некоторую сомкнутую линию, симметрическую около оси, проходящей через центр С.
Такое преобразование вращательного движения может иметь полезное применение там, где представляется надобность дать точке движение, к которому достаточно близко подходит движение точки М в рассматриваемой нами системе при каких-либо размерах ее частей положениях неподвижных центров вращения. Вся трудность в определении тех и других согласно с видом движения, которое желают получить.
Рассмотрим случаи, наиболее простые и чаще представляющиеся на практике, а именно, когда имеется в виду получить движение по кривой, которой некоторая часть, более или менее значительная, мало разнится от дуги круга или от прямой линии.
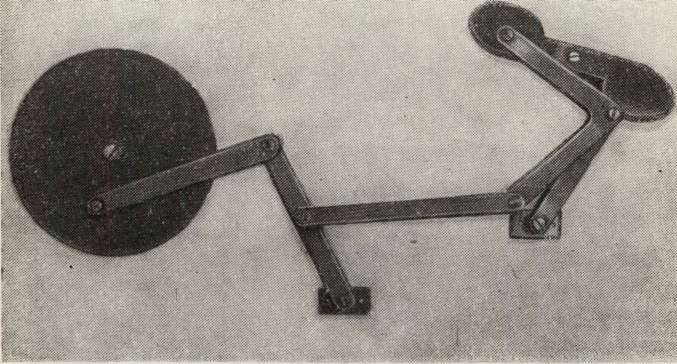
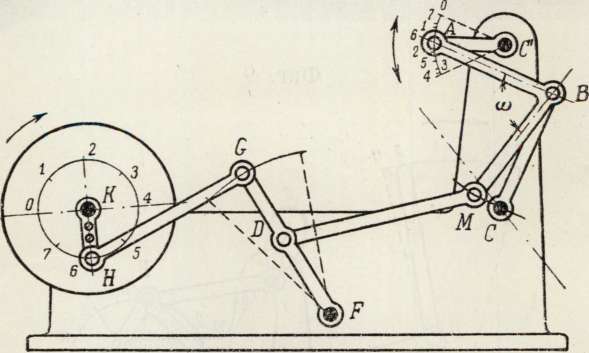
Моделирование механизма для преобразования качательного движения во вращательное
В приложении к книге П.Л. Чебышева «Избранные труды» приведены схема и расчеты для модели превращения качательного движения во вращательное.
Значение теории механизмов П.Л. Чебышева для дальнейшего развития науки
П. Л.Чебышеву удалось создать теорию механизмов, которой пользуются до сих пор при создании двигателей и различных механизмов. А появление ЭВМ дало возможность эффективно и быстро выполнять третий этап синтеза, определяя оптимальные сочетания параметров механизма и даже решая такие задачи синтеза, которые ранее не могли быть решены из-за сложности и трудоёмкости вычислений. В 1965—1972 для типовых задач синтеза механизмов были составлены программы вычислений на ЭВМ, позволяющие оптимизировать различные критерии и учитывать большое количество кинематических, динамических и конструктивных ограничений.
Раздел динамики механизмов иногда называется динамикой машин, так как учёт динамических явлений, происходящих в механизмах, имеет первостепенное значение при проектировании машин. В первых работах по динамике машин, выполненных Н. Е. Жуковским и Н. И. Мерцаловым (1866—1948), использовалась только механика твёрдого тела применительно к механизмам с жёсткими звеньями. После внедрения в машины новых механизмов с гидравлическими, а затем и с пневматическими устройствами (1930—1950) динамика машин стала опираться не только на механику твёрдого тела, но и на механику жидкостей и газов. В связи с существенным ростом нагруженности и быстроходности машин и повышением требований к их качеству значительно изменилось содержание задач динамики машин: появилась необходимость учитывать упругие свойства звеньев, зазоры в подвижных соединениях, переменность масс и моментов инерции и т. п.
Сравнительно недавно (1945—1950) стала рассматриваться как одна из важнейших частей теории машин и механизмов - теория машин-автоматов. Машины-автоматы отличаются от неавтоматизированных машин в первую очередь тем, что последовательность работы отдельных механизмов, включая механизмы загрузки и выгрузки, задаётся системой управления. Поэтому развитие теории машин-автоматов связано с совершенствованием методов построения схем управления по выбранному критерию оптимальности, например по условию получения минимального числа элементов, составляющих схему. Наибольшее распространение получили методы, основанные на применении алгебры-логики, и соответственно этот раздел теории машин-автоматов получил название логического синтеза систем управления. В системах управления наряду с электрическими элементами стали применяться пневматические, обладающие, как правило, большей надёжностью. Развитие методов построения систем управления машинами-автоматами привело к созданию систем программного управления, в которых программа требуемых перемещений выражается в форме чисел (цифр) — элементарных (малых) шагов. Для реализации этих шагов предусматривают специальные типы двигателей, называемые шаговыми электродвигателями. Особую ценность имеют самонастраивающиеся и адаптирующиеся системы программного управления, в которых программа автоматически корректируется с учётом опыта предшествующих циклов работы системы и условий, в которых должна работать эта система.
В 1944 году Академия наук СССР учредила премии имени П. Л. Чебышева за лучшие исследования в области математики и теории механизмов и машин.
Заключение
В ходе исследовательской работы мы познакомились с биографией, трудами замечательного русского ученого П.Л. Чебышева. Мы гордимся тем, что благодаря замечательным работам Чебышева наша русская наука о механизмах стала передовой и самостоятельной, с особым самобытным направлением. П.Л.Чебышеву принадлежит заслуга научной постановки и блестящего разрешения ряда задач, касающихся одной из труднейших проблем теории механизмов — проблемы синтеза (проектирования) механизмов, той проблемы, над разрешением которой работали в течение последнего столетия и продолжают работать крупнейшие русские и иностранные ученые.
В ходе работы мы убедились, что труды П. Л. Чебышева, исключительно богатые новыми идеями и методами, дали мощный толчок к развитию многих ветвей математики и механики.
Идеи П.Л. Чебышева вдохновили нас на создание собственной действующей модели механизма, превращающего вращательное движение в качательное. Для выполнения расчетов, нам пришлось познакомиться с теорией механизмов.
Список литературы
- Артоболевский И.И. Механизмы в современной технике, т.2, Москва, «Наука», 1979.
Артоболевский И.И., Левитский Н.И. Механизмы П.Л. Чебышева. Сб. «Научное наследие П.Л. Чебышева», изд. АН СССР, М. – Л., 1945, вып. 2.
Прудников В. Е. Пафнутий Львович Чебышев, 1821—1894. Л.: Наука, 1976.
Чебышев П.Л. Избранные труды, М.-Л.: ОГИЗ Гостехиздат, 1946. – 929с.
Интернет-ресурсы:
- http://www.vokrugsveta.ru/telegraph/technics/691/
http://www.etudes.ru/ru/mov/mov043/
http://www.tcheb.ru/

- Мультимедиа технологии (История появления мультимедиа технологии)
- Провалы Рынка
- ЧТО ТАКОЕ НЕЙРОННАЯ СЕТЬ? (Базовые понятия искусственного нейрона)
- История развития ЭВМ (Счётно-решающие средства до появления ЭВМ).
- История развития ЭВМ (создание первых компьютеров)
- история развития ЭВМ
- Классы современных ЭВМ (ИТ в дизайне)
- Классы современных ЭВМ (Дисциплина: ИТ в дизайне)
- Херсонес Таврический ( ИСТОРИЯ ГОРОДА ХЕРСОНЕС)
- Защита государственной тайны
- Правила деловой риторики (Риторика как наука и искусство. Основные понятия риторики.)
- Провалы Рынка (Провалы рынка в современной экономике)