
Принцип виртуальных перемещений в теоретической механике
Содержание:
Принцип Д’аламбера и принцип виртуальных перемещений
Силой инерции материальной частицы называют геометрическую сумму сил Противодействия движущейся материальной частицы телам, сообщающим ей ускорение
Сила инерции
Если в задаче динамики или статики требуется определить движение или условия равновесия какого-либо материального объекта, то, составляя уравнения движения или равновесия этого материального объекта, мы включаем в них только те силы, которые на него реально действуют. В эти уравнения не должны входить силы, с которыми данное тело действует на окружающие материальные тела.
Однако в динамике есть и такой метод решения задач, где наряду с силами, приложенными к данному объекту и сообщающими этому объекту ускорение, учитывают также и силы, с которыми данный объект противодействует телам, сообщающим ему ускорение.
Пусть имеется некоторая материальная частица M (рис. 224, а) и другие материальные объекты M1, M2, M3, ..., действие которых на данную материальную частицу M представлено силами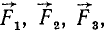
Материальная частица M противодействует телам M1, M2, M3, ... . Силы противодействия равны силам
Приложим (совершенно условна) эти силы противодействия не к телам M1, M2, M3 ..., к которым они приложены в действительности, а к материальной частице M и сложим их (рис. 224, в). Эту геометрическую сумму сил противодействия движущейся материальной частицы M телам M1, M2, M3, .... сообщающим ей ускорение, называют силой инерции. Мы будем обозначать ее буквой Ф.
Рис. 224
Понятие «сила инерции» нельзя отождествлять с уже знакомым нам понятием «инерция». Еще Лазар Карно, первый определивший (1803 г.) силу инерции как силу, «которую тело сообщает всем другим телам, стремящимся вывести его из данного состояния», указывал, что «сила инерции»—величина, вводимая в вычисления наравне с другими силами, тогда как «инерция»—это проявление присущего материи свойства сохранять движение без действия сил.
Сила инерции материальной частицы выражается произведением массы частицы на ее ускорение и направлена противоположно ускорению
Силы инерции широко применяют в науке и технике при различных расчетах, о чем будет сказано в дальнейшем, а сейчас определим величину, направление и размерность силы инерции. Ускорение а, получаемое частицей M под действием сил согласно основному закону динамики (123') направлено по равнодействующей всех этих сил и пропорционально ей.
Составляющие силы, геометрическая сумма которых является силой инерции, равны, но противоположны силам ..., действующим на частицу М, а потому сила инерции частицы M по величине равна произведению массы частицы на ее ускорение, но направлена в сторону, противоположную ускорению:
 (248)
(248)
Как видно из этого равенства, размерность силы инерции Ф есть размерность обычных ускоряющих сил, т. е. в физической системе единиц:
[Φ]ф = L1M1T-2
и в технической системе единиц:
[Φ]Т =L0F1T0.
Единицей силы инерции в технической системе единиц могут служить килограмм-сила или его дробные и кратные единицы, а в СИ — ньютон (н).
Касательной силой инерции называют составляющую силы инерции, направленную по касательной к траектории частицы и равную произведению массы частицы на ее касательное ускорение с обратным знаком:

Составляющие силы инерции
В различных задачах динамики, в которых применяют силы инерции, эти силы приходится проецировать на оси и раскладывать по различным направлениям, причем особенно часто по направлениям касательной и главной нормали. Так как сила инерции противоположна ускорению частицы, то и направляющие косинусы силы инерции по величине равны, а по знаку противоположны направляющим косинусам ускорения, и компонента силы инерции по касательной к траектории точки M равна
 (249)
(249)
или по абсолютной величине
Эту компоненту называют касательной силой инерции. Как видно из полученного равенства, касательная сила инерции частицы равна произведению массы частицы на ее касательное ускорение и направлена в сторону, противоположную касательному ускорению, т. е. против скорости при ускоренном движении и по скорости — при замедленном.
Нормальной силой инерции называют составляющую силы инерции, направленную по главной нормали к траектории частицы и равную произведению массы на ее нормальное ускорение с обратным знаком:

Компоненту силы инерции, направленную по главной нормали к траектории частицы, называют нормальной силой инерции материальной частицы:
 (250)
(250)
По абсолютной величине
Как видно из (250), нормальная сила инерции частицы равна произведению ее массы на нормальное ускорение и направлена против нормального ускорения, т. е. всегда в сторону выпуклости траектории. Нормальную силу инерции частицы вращающегося тела
называют центробежной силой.
Касательную и нормальную силы инерции можно рассматривать как проекции силы инерции Ф на касательную и на главную нормаль. В таком случае они являются скалярными величинами, как всякие проекции силы на ось.
Если ко всем действующим на точку силам добавить силу инерции, то систему действующих на точку сил можно считать на данное мгновение уравновешенной и применять к ней законы статики
Принцип Д’Аламбера для одной материальной точки
Изложим принцип Д’Аламбера сначала для одной материальной точки, а потом распространим его на механическую систему. Согласно основному уравнению статики точка находится в состоянии равновесия, если сумма всех действующих на точку активных и реактивных сил равна нулю:
 (2)
(2)
Основным уравнением динамики является
 (123')
(123')
Пусть некоторая точка M массы т под действием всех приложенных к ней активных сил и реакций связи получила ускорение а. Будем считать, что к точке M приложена также и сила инерции Ф.
Тогда, сложив почленно равенства (123') с равенством (248), получим
или
 (251)
(251)
Уравнение динамики переходит в уравнение статики, если ко всем действующим на точку активным силам и силам реакций связей прибавить еще и силу инерции Ф, а следовательно, при этом условии задачу динамики можно решать методами статики. В этом заключается принцип Д’Аламбера.
Если спроецировать все приложенные к точке силы (включая и силу инерции) на оси координат, то принцип Д’Аламбера можно записать в такой форме:
 (252)
(252)
Здесь
 (253)
(253)
Обозначим через  равнодействующую всех приложенных к точке активных сил, а равнодействующую всех реакций обозначим
равнодействующую всех приложенных к точке активных сил, а равнодействующую всех реакций обозначим  . Тогда равенство (251) можно записать так:
. Тогда равенство (251) можно записать так:
 (251')
(251')
Если к каждой точке материальной системы приложить силу инерции, то систему можно считать на данное мгновение находящейся в равновесии и применять к вей уравнения статики
Принцип Д’Аламбера для системы материальных точек
Пусть на материальные частицы системы действуют активные силы и реакции связей. Приложим к каждой частице системы силу инерции, равную произведению массы частицы на ее ускорение, но направленную против ускорения частицы. Тогда для каждой частицы можно написать
где  — равнодействующая всех активных сил, приложенных к этой частице,
— равнодействующая всех активных сил, приложенных к этой частице,  — равнодействующая реакций связей, наложенных на эту частицу,
— равнодействующая реакций связей, наложенных на эту частицу,  —сила инерции этой частицы.
—сила инерции этой частицы.
Составив такие уравнения для всех точек системы, мы убедимся, что каждую из этих точек можно считать находящейся в данное мгновение в равновесии. Таким образом, если к каждой точке системы ,приложить силу инерции, то систему можно рассматривать как находящуюся в данное мгновение в равновесии и применять к ней уравнения статики. В этом заключается принцип Д’Аламбера для материальной системы.
Рассматривая только силы инерции, приложенные к какому-либо телу, можно, следуя методу Пуансо, привести их к одной точке, заменить их главным вектором сил инерции и главным моментом сил инерции относительно этой точки и т.п., как это делают в в статике.
Сила инерции не действует на данную массу, но действует на тела, осуществляющие связь
При определении силы инерции материальной частицы M мы мысленно приложили к ней силы действия (или противодействия) этой частицы на другие материальные тела, сообщающие ей ускорение, и геометрическую сумму этих сил назвали силой инерции частицы М. Но эти силы- в действительности приложены не к частице М, а к окружающим ее телам, среди которых могут быть и тела, осуществляющие связь, наложенную на частицу M (тело M2 на рис. 224). Сила инерции лишь мысленно приложена нами к данной частице М. Если бы с-ила инерции реально действовала на массу, то она реально уравновесила бы все прочие силы, приложенные к этой массе и привела бы массу в равновесие.
Так, например, если бы на нашу планету, движущуюся вокруг Солнца, кроме силы притяжения к Солнцу, реально действовала бы и центробежная сила, равная произведению массы Земли на ее центростремительное ускорение и направленная от Солнца, то обе эти силы (сила притяжения и центробежная сила) взаимно уравновесились бы. Тогда согласно принципу инерции Земля продолжала бы удерживаться в состоянии равномерного прямолинейного движения, пока и поскольку приложенные силы не принудили бы ее изменить это состояние. Но с точки зрения классической механики дело обстоит иначе. На движущуюся Землю действует реальная сила притяжения к Солнцу. Центробежная сила инерции на Землю не действует. Земля обладает скоростью, направленной под углом к прямой, соединяющей ее с Солнцем. Сила притяжения к Солнцу сообщает Земле ускорение, направленное по силе. Нормальное ускорение изменяет направление скорости Земли, и Земля описывает эллипс, находясь под действием лишь одной силы притяжения к Солнцу.
Сила, с которой Земля притягивается к Солнцу, приложена к Земле. Равная и обратная сила приложена к Солнцу. Других сил в этой системе двух свободных тел нет. Применяя к Земле любое уравнение динамики, мы должны учитывать лишь одну реально действующую на Землю силу тяготения к Солнцу. Только в случае, если мы желаем применить уравнения статики, рассматривать Землю как находящуюся в данное мгновение в равновесии, только применяя принцип Д’Аламбера или принцип виртуальных перемещений (см. §51), мы мысленно прикладываем к Земле силу, действующую на Солнце, и называем ее силой инерции Земли.
Динамической реакцией связи называют реакцию связи, вызванную действием сил инерции
Динамические реакции
Но силы инерции необходимо учитывать при определении сил, действующих на связи. Силы инерции изменяют реакции связей, и в телах, осуществляющих связь, производят такие же явления, как и прочие известные нам силы, деформируют эти тела, вызывают в них внутренние напряжения и могут даже разрушить.
Рассмотрим пример, внешне очень похожий на предыдущий. Грузик, весом которого пренебрегаем, закрутили на нитке, другой конец которой держат в руке, грузик движется по окружности с постоянной скоростью. На грузик действует единственная сила — натяжение нитки, направленная от грузика к руке. Эта единственная сила выводит грузик из присущего ему, по свойству инерции, равномерного и прямолинейного движения, сообщает грузику нормальное ускорение. Противодействие этой силы приложено к нитке, натягивает ее с силой, равной силе инерции груза.
Реакции связи, вызванные силами инерции, называют динамическими реакциями. При решении следующих задач покажем применение принципа Д’Аламбера к определению динамических реакций.
Задача №1
Ускорение скоростного лифта высотного здания при подъеме изменяется в пределах от +2 м/сек2 до —2 м/сек2. Определить натяжение троса, если вес кабины с пассажирами 1200 кГ.
Решение. Задачу решаем методом Д’Аламбера в СИ. Натяжение троса происходит от веса G= 1200 кГ (статическая нагрузка) и от силы инерции Ф (динамическая нагрузка). К действующим на кабину лифта силам (вес G = m∙g = 11 772 н и натяжение T троса) мысленно прикладываем силу инерции  и рассматриваем равновесие лифта.
и рассматриваем равновесие лифта.
Если лифт поднимается ускоренно, то ускорение направлено вверх, а сила инерции — вниз:

откуда, считая ускорение максимальным,

Если лифт поднимается замедленно, то ускорение направлено вниз, а сила инерции — вверх:

откуда

Сила инерции реальна для троса (для связи), так как она меняет его натяжеиие. На кабину лифта сила инерции не действует, так как не приводит ее ни в состояние покоя, ни в равномерное прямолинейное движение.
Ответ. Tmax= 14 172 н = 1445 κΓ; Tmin = 9372 н = 955 кГ.
Задача №2
Вагон совершает вертикальные гармонические колебания по закону у=0,4 sin 10 πt (вибрация). Колебания происходят на рессорах, расположенных между кузовом вагона, весящим 20 Т, и его тележкой, весящей вместе с колесами 2 Т. Определить давления на рельсы.
Решение. Задачу будем решать, применяя принцип Д’Аламбера. Единицами измерения примем L в м, F в T и Т в сек. На вагон действуют следующие силы: вес (кузова и тележки) 22 T и реакция рельсов R.
Определяем силу инерции:

Экстремальные значения силы инерции получим, положив sin 10πt= ± 1. Сокращая π2 = 9,86 и g =9,81, определим

Нагрузка на рельсы складывается из статической (вес кузова и тележки) и динамической (силы инерции кузова). Давление вагона на рельсы найдем из условия равновесия всех сил (включая и силу инерции), действующих на вагон:

Ответ. Максимальное давление 30 T; минимальное давление 14 Т.
Сила инерции действует на рельсы, так как изменяет давление вагона на рельсы. Сила инерции не действует на вагон, так как не приводит его в состояние равновесия.
Задача №3
Автомобиль весом 1000 кГ движется по выпуклому мосту со скоростью υ =10 м/сек; радиус кривизны в середине моста р=50 м. Определить давление автомобиля на мост в мгновение прохождения его через середину моста.
Решение. Рассмотрим автомобиль, движущийся по мосту (рис. 225).
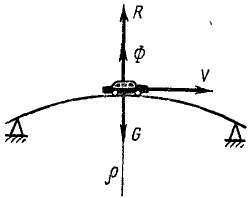
Рис. 225
На автомобиль действуют его вес G = 1000 кГ и реакция моста R. Эти силы не уравновешивают друг друга, так как автомобиль не находится в равновесии. К этим действующим на автомобиль силам приложим мысленно еще силу инерции, равную массе автомобиля, умноженной на ускорение. Автомобиль движется равномерно по криволинейной траектории, поэтому он имеет центростремительное ускорение. Нормальная сила инерции

Силу инерции прикладываем к автомобилю, направляем ее вверх, против нормального ускорения. (В формулах сил инерции знак «—» показывает, что сила инерции направлена против ускорения). Дав такое направление силе (в данном случае вверх), мы тем самым учитываем знак минус и в дальнейшем считаем силу положительной.
После того как сила инерции прибавлена, система сил как бы находится в равновесии, и мы можем применять к пей уравнения статики. Составим сумму проекций сил на вертикальную ось:

откуда

Заметим, что сила инерции реально действует на связь (в данном случае на мост) и не действует на движущуюся точку (в данном случае на автомобиль), к которой мы ее прикладываем. Сила инерции реальна для моста, так как давление на мост действительно меньше статического на величину силы инерции. Сила инерции не действует на автомобиль, так как в таком случае он находился бы под действием уравновешенной системы сил и двигался бы равномерно и прямолинейно.
Ответ. R = 796 кГ.
Задача №4
Определить, с какой скоростью должен двигаться искусственный спутник Земли на высоте h = 900 км, если орбиту спутника принять за окружность с центром в центре Земли. Радиус Земли R = 6370 км. Ускорение тела, свободно падающего у поверхности Земли, g =9,81 м/сек2. Сила притяжения спутника обратно пропорциональна квадрату расстояния спутника от центра Земли. Спутник считать точечной массой.
Решение. На спутник действует сила притяжения, направленная к центру Земли,
где m— масса спутника, μ-коэффициент, найденный при решении задачи № 155, μ=gR2. Следовательно, сила притяжения, действующая на спутник,
Эта сила сообщает спутнику нормальное ускорение, направленное к центру Земли,
Приложим мысленно к спутнику центробежную силу инерции ФN, равную mαN и направленную противоположно центростремительному ускорению. По принципу Д’Аламбера, эта сила уравновешивает единственную действующую на спутник силу F. А по аксиоме статики две взаимно уравновешивающиеся силы по величине равны. Следовательно,
откуда находим скорость спутника:

Ответ. υ = 7,4 км/сек.
Задача №5
Бревно AB длиной l опирается концом А на горизонтальную дорогу AE; другой конец его В привязан веревкой BD длиной d в точке D к грузовику, движущемуся равноускоренно по прямолинейному горизонтальному участку пути, причем высота ED=h. Пренебрегая поперечными размерами бревна, найти, при каком ускорении а грузовика веревка и бревно составляют одну прямую (рис. 226).
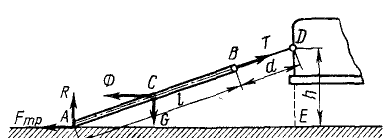
Рис. 226
Решение. На бревно действуют следующие силы: вес G=mg, приложенный в середине бревна С; натяжение веревки Т, приложенное в точке В и направленное к точке D; реакция R, приложенная в точке А и направленная вертикально вверх; сила трения FTp, приложенная к бревну в точке А и направленная горизонтально влево. Прикладываем к бревну силу инерции Ф. Эту силу прикладываем в центре инерции C бревна и направляем против ускорения, т. е. горизонтально влево. По величине эта сила равна m. а. Сила инерции уравновешивает всю .систему сил, и мы вправе применять уравнения статики. Составляем сумму моментов всех сил относительно точки А:

откуда

Как видно из чертежа:

Подставляя в предыдущее равенство, определим ускорение. Ответ.
При таком ускорении автомобиля давление бревна на дорогу, а следовательно, и сила трения равнялись бы нулю.
Силы инерции вращающегося звена
Задача №6
Определить величину, направление и точку приложения равнодействующей всех сил инерции звена, вращающегося вокруг неподвижной оси О при следующих данных: масса звена m, момент инерции относительно оси вращения J, расстояние центра масс C от оси вращения ОС = с, угловая скорость в данное мгновение ω, угловое ускорение ε.
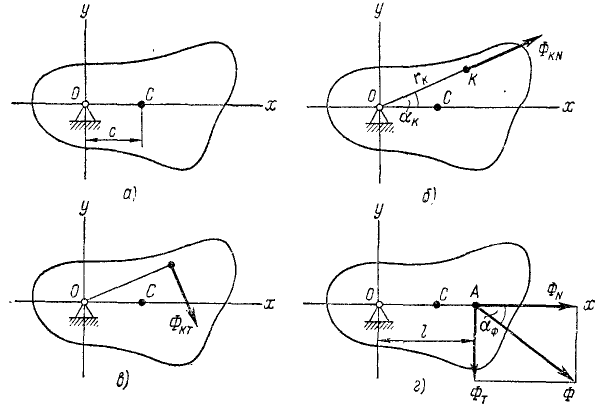
Рис. 227
Решение. Построим систему координатных осей хОу (рис. 227, а) с началом на оси вращения, направив ось Ox к центру масс звена, тогда координаты центра масс:

где mk— масса материальной частицы, a xk и yk—ее координаты, и суммирование распространено на все материальные частицы звена.
К каждой материальной частице звена мысленно приложены центробежная сила инерции и касательная сила инерции. Требуется найти равнодействующую этих сил.
Займемся сначала центробежными силами. Если радиус-вектор k-й частицы обозначим  , а угол, составляемый ради усом-вектором с осью Ох, обозначим αk (рис. 227, б), то центробежная сила этой частицы и ее проекции на оси Ox и Oy выразятся следующим образом:
, а угол, составляемый ради усом-вектором с осью Ох, обозначим αk (рис. 227, б), то центробежная сила этой частицы и ее проекции на оси Ox и Oy выразятся следующим образом:
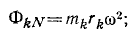


Центробежная сила направлена обратно центростремительному ускорению (от оси вращения О звена), следовательно, центробежные силы всех частиц плоского звена представляют собой плоский пучок сил, пересекающихся в точке О.
Равнодействующая ФN этого пучка (центробежная сила звена) Приложена в той же точке О, проекции этой силы:

Следовательно, центробежная сила звена направлена по оси Ох, т. е. от осн вращения звена к центру масс, и равна произведению массы звена на центростремительное ускорение центра масс:

Перейдем теперь к касательным силам инерции (рис. 227, в). Касательная сила инерции элементарной частицы равна произведению массы этой частицы на ее касательное ускорение и направлена против ускорения:
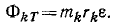
Проекции этой силы на оси координат:


Линии действия касательных сил инерции различных частиц не пересекаются в точке О, и, чтобы сложить эти силы, надо, следуя методу Пуансо, перенести их к точке О, добавив соответствующие пары, моменты которых равны моментам данных сил относительно точки приведения.
Момент касательной силы инерции, приложенной к k-й точке относительно начала координат О, подсчитаем по формуле (28):

Проекции главного вектора касательных сил инерции:

Следовательно, главный вектор касательных сил инерции равен (по модулю) произведению массы звена на тангенциальное ускорение центра масс звена:
Но этот главный вектор не является равнодействующей касательных сил инерции, так как при перенесении этих сил появился главный момент касательных сил инерции относительно точки приведения, равный алгебраической сумме моментов тангенциальных сил инерции всех частиц звена:

Итак, главный момент касательных сил инерции звена относительно оси вращения равен взятому с обратным знаком произведению момента инерции на угловое ускорение.
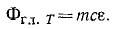
Представим главный момент в виде пары, силы которой равны главному вектору, а плечо l равно отношению главного момента к главному вектору:
Мы получили знакомое нам выражение (199) приведенной длины физического маятника.
Одна из сил пары уравновешивается главным вектором Φгл. Т касательных сил инерции, и остается равнодействующая касательных сил инерции, которая равна произведению массы звена на касательное ускорение центра масс, но приложена в центре качания А звена.
Перенесем в центр качания А по линии действия центробежную силу  (рис. 227, г), сложим здесь обе составляющие (ФN и ΦT) силы инерции и найдем равнодействующую всех сил инерции звена.
(рис. 227, г), сложим здесь обе составляющие (ФN и ΦT) силы инерции и найдем равнодействующую всех сил инерции звена.
Определим модуль равнодействующей:
и по (6) определим направляющие косинусы:

Ответ. Сила инерции равна произведению массы звена на ускорение центра масс, направлена против ускорения центра масс, но приложена не в центре масс, а в центре качания.
Задача №7
Решить задачу, применив для системы принцип Д’Аламбера.
Решение. Рассмотрим вращение первого вала вокруг оси I — I. На вал действуют вращающий момент M1=50 кГ и момент сопротивления второго вала —Fr1. Добавим момент сил инерции, который равен М (Ф) =—J1ε1.
Имеем
M1- Frl-J1ε1 = 0.
Рассмотрим вращение второго вала вокруг оси II—II. На него действуют момент со стороны первого вала Fr2. Добавим момент сил инерции —J2ε2. Имеем
Fr2 - J 2ε2 = 0∙
Определим отсюда F и подставим в предыдущее уравнение:
Но  и
и  . Кроме того, дано M1 = 50 кГ, J1 = 5 кГм . сек2, J2 = 4 кГм . сек2 и предыдущее уравнение принимает вид:
. Кроме того, дано M1 = 50 кГ, J1 = 5 кГм . сек2, J2 = 4 кГм . сек2 и предыдущее уравнение принимает вид:

Теперь, когда угловое ускорение второго вала определено, легко вычислить по формулам (87) равноускоренного вращения время, в течение которого вал разовьет угловую скорость ω2 = 4π и число оборотов за это время.
Ответ. n' — 2,344 оборота.
Задача №8
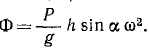
Стержень длины 2h (рис. 228, а), на концах которого находятся грузы K1 и K2 равного веса (P1 = P2=P) вращается равномерно с угловой скоростью ω вокруг вертикальной оси ACS, проходящей через середину C длины стержня. Расстояние точки C от подпятника АС =а, от подшипника BC = b, AB = a+b=l. Угол между стержнем и осью вращения AB сохраняет постоянную величину а. Пренебрегая весом стержня и размерами грузов, определить проекции давлений на опоры Л и В в тот момент, когда стержень находится в плоскости Ayz.
Решение. Вращающаяся механическая система (твердое тело) состоит из двух точек: K1 с координатами x1=0, y1=-h sinα, z1=a — h cos a и K2 с координатами x2=0, y2= +h sinα, z2= + a + h cos a . На систему (рис. 228,6) действуют внешние силы: веса точек P1 = Р2 = P и реакции в опорах, которые мы проецируем на оси координат. Задачу решим двумя способами: 1) с применением общих уравнений динамики и 2) с применением принципа Д’Аламбера.
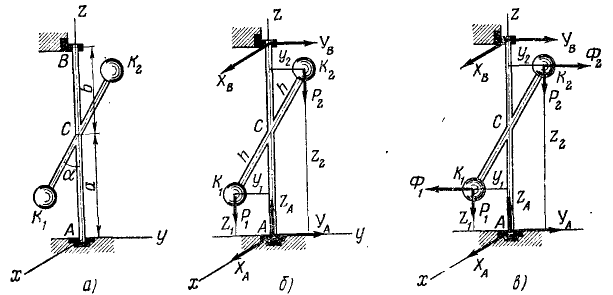
Рис. 228
1-й способ. Для решения задачи первым из указанных способов выпишем уравнения, полученные нами при решении аналогичной задачи № 149:
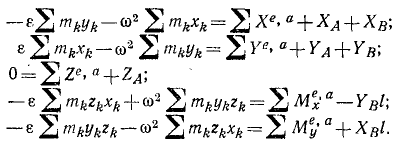
Подставим в это уравнения данные для рассматриваемой системы и положим ε = 0:



Решая уравнения, находим проекции реакций:

Проекции давлений на опоры имеют ту же величину, но обратные знаки.
2-й способ. Решим теперь задачу методом Д’Аламбера. К действующим в системе внешним (активным и реактивным) силам прибавим мысленно силы инерции. Тело вращается равномерно, поэтому к точкам мы приложим только центробежные силы инерции (рис. 228, в):
Теперь мы можем рассматривать систему как находящуюся в равновесии. Составим уравнения (42) равновесия пространственной системы сил:
Шестое уравнение равновесия превращается в тождество 0 = 0. Решая уравнения, находим проекции реакций, а затем и проекции давлений.
Рассмотрим в отдельности систему сил инерции.
Главный вектор этой системы равен нулю:

Моменты сил- относительно осей у и z тоже равны нулю. Определим сумму моментов центробежных сил инерции относительно оси х. Момент центробежной силы, приложенной к точке K2, определим по формуле (23):

Аналогично выражается момент силы Φ1:
причем знаки моментов получатся автоматически после подстановки в формулу (23) значений (с их знаками) проекций силы и координат точки приложения силы. Главный момент центробежных сил инерции относительно оси х равен сумме моментов всех центробежных сил:
Поэтому сумму произведений массы каждой материальной частицы тела на две координаты этой частицы в данной прямоугольной системе осей называют центробежным моментом инерции:
Таким образом, система сил инерции приводится к паре сил с моментом

Пара сил инерции уравновешивается парой сил реакции в опорах. Вращающееся тело уравновешено статически (xc = 0; yc = 0), но динамическая неуравновешенность (Jvz ≠ 0) вызывает дополнительные давления на опоры.
Ответ. Проекции давлений на опоры:
Сравним оба способа, которыми мы решили задачу № 180.
При втором способе решения задачи мы применяли метод Д’Аламбера, для чего ко всем фактически действующим на тело активным силам и реакциям мы мысленно добавили силы инерции его точек. Обратим внимание на то, что сила инерции какой-либо точки, например A1 или A2, является силой противодействия, оказываемого этой точкой стержням, с которыми она жестко связана и вращение которых сообщает ей центростремительное ускорение. Противодействие передается на опоры и они воспринимают давления неуравновешенного вращающегося тела. Таким образом, сила противодействия оказывается фактически приложенной к опорам А и В. При решении задачи по методу Д’Аламбера мы условно перенесли это давление к самой движущейся массе, отчего система всех сил. приложенных к вращающемуся телу (фактически или только мысленно), оказалась в равновесии. Написав для этой системы сил шесть уравнений статики, мы решили их и определили реакции в опорах, а следовательно, и давления на опоры.
Решая задачу первым способом, мы учитывали только фактически действующие на тело активные и реактивные силы и составили шесть всеобщих уравнений движения (169) и (192), связывающих проекции этих сил с массами и с проекциями ускорений частиц тела. Силы инерции не входят во всеобщие уравнения движения, так как они не действуют на массы, для описания движения которых написаны эти уравнения, т. е. в данном случае они не действуют на точки тела, вращение которого рассматривается в задаче. Решив уравнения движения, мы определили реакции в опорах, а следовательно, и давления на опоры. Таким образом, мы решили задачу как прямую основную задачу динамики: по данному движению системы мы определили силы, действующие на точки системы.
Во всех уже известных нам теоремах и методах мы учитывали только «эффективные», или «ускоряющие», силы, т. е. активные или реактивные силы, фактически приложенные к материальному объекту, движение которого мы изучали. Силы инерции мы применили впервые лишь в принципе Д’Аламбера. В следующем параграфе мы ознакомимся с принципом виртуальных перемещений, в некоторые уравнения которого также входят силы инерции. При решении задач прочими изложенными в нашем курсе методами силы инерции учитывать не надо.
Принцип виртуальных перемещений. Общее уравнение динамики
Идеальными связями называют связи, при которых сумма виртуальных работ их реакций равна нулю:

Идеальные связи
В уравнения равновесия и во всеобщие уравнения движения наряду с активными силами входят и реакции связей. В этих уравнениях могут быть и неизвестные реакции, часто (особенно в динамике) затрудняющие решения.
Если в связях отсутствует трение, то можно при помощи методов, основанных на принципе виртуальных перемещений, получить уравнения, не содержащие сил связи.
В статике мы пользовались виртуальными перемещениями для определения направления реакций. При отсутствии трения мы направляли реакции перпендикулярно к плоскости виртуальных перемещений и называли такие реакции идеальными.
Сила, перпендикулярная к перемещению, не производит работы. Поэтому работа идеальной реакции при виртуальном перемещении равна нулю. Так как существуют связи более сложной природы, выражаемые уравнениями, то указанное свойство принимают как определение и под идеальными связями понимают такие связи, при которых сумма элементарных работ их реакций на всяком виртуальном перемещении системы (или, как говорят, сумма виртуальных работ) равна нулю. Будем считать их связями без трения, стационарными, т. е. не изменяющимися со временем, и удерживающими, т. е. не допускающими таких перемещений, в результате которых точка освобождается от связи.
Виртуальными перемещениями называют воображаемые бесконечно малые перемещения материальной точки или механической системы, допускаемые в данное мгновение наложенными связями без нарушения их
Виртуальные перемещения
Расширим теперь понятие виртуальных («возможных») перемещений, которое нам известно еще со статики. Дадим материальной точке M виртуальное перемещение, т. е. воображаемое бесконечно малое перемещение δr, которое не нарушит связей и произойдет при фиксированном значении t, как бы мгновенно. Тогда координаты точки получат бесконечно малые приращения, называемые изохронными вариациями координат. Это название показывает, что изменения координат происходят при данном значении t. Мы уже встречались с вариациями координат (см. § 38) и обозначили их δx, δy, δz в отличие от обозначений дифференциалов dx, dy, dz, которые выражают действительные бесконечно малые изменения координат точки, происходящие за бесконечно малый промежуток времени dt.
Различие между дифференцированнем и варьированием какой-либо функции f(x, у, z, t) обнаруживается при вычислении бесконечно малых изменений этой функции, получающихся вследствие того, что при дифференцировании время t является переменной величиной, при вариации координат, при виртуальных перемещениях время рассматривают как постоянный параметр. Таким образом,

и

Из сопоставления этих двух равенств следует, что вариации функции f(x, у, z, t) вычисляют по тому же правилу, что и дифференциал, но при фиксированном значении t. Отсюда становится ясным и различие между воображаемым виртуальным перемещением (происходящим как бы при остановившемся времени) и действительным перемещением (происходящим с течением времени под действием сил и реакций, приложенных к данной точке).
Заметим, что все сказанное здесь о виртуальном перемещении одной точки относится также и к виртуальным перемещениям системы точек.
Работу силы на виртуальном перемещении обозначают δA и иногда коротко называют виртуальной работой.
Если механическая система находится в равновесии, то при любом виртуальном перемещении системы сумма работ всех активных сил равна нулю:

Принцип виртуальных перемещений при равновесии системы
Пусть какая-либо механическая система находится в равновесии, т. е. все точки системы находятся в равновесии под действием активных сил и идеальных реакций. Покажем, что в этой системе сумма элементарных работ всех активных сил на всяком виртуальном перемещении равняется нулю.
Рассмотрим какую-либо одну из точек этой системы. Точка находится в равновесии под действием активных сил (равнодействующую которых обозначим  ) и идеальных связей (равнодействующую реакций которых обозначим
) и идеальных связей (равнодействующую реакций которых обозначим  ). Так как точка находится в равновесии, то равнодействующая всех приложенных к ней сил равна нулю:
). Так как точка находится в равновесии, то равнодействующая всех приложенных к ней сил равна нулю:
Известно, что работа равнодействующей равна сумме работ составляющих. А так как равнодействующая всех сил, приложенных к взятой нами точке, равна нулю, то, следовательно, равна нулю и сумма элементарных работ всех приложенных к точке активных и реактивных сил, если мы сообщим этой точке какое-либо виртуальное перемещение.
Точку мы выбрали произвольно, и сказанное относится ко всем точкам механической системы.
Дадим теперь механической системе какое-либо виртуальное перемещение. Это перемещение (как всякое виртуальное перемещение) выводит систему из данного положения, но не нарушает связей. Как доказано, сумма работ всех активных сил системы и работ всех идеальных реакций на этом виртуальном перемещении равняется нулю:
Но вторая сумма этого равенства тождественно равняется нулю, потому что связи идеальные, следовательно, равна нулю и первая сумма:
 (254)
(254)
Это равенство выражает принцип виртуальных перемещений: для того чтобы механическая система в некотором положении находилась в равновесии, необходимо, чтобы при любом виртуальном перемещении сумма элементарных работ всех активных сил равнялась нулю.
При решении задач статики по принципу виртуальных перемещений удобно выражать элементарную работу по (221); тогда условие (254) принимает вид
 (255)
(255)
Это уравнение называют общим уравнением статики.
Задача №9
Через две гладкие взаимно перпендикулярные плоскости AB и BC (рис. 229) перекинута тяжелая цепь так. что 100 см цепи лежит на АВ, а остальные 70 см — на ВС. Определить угол ВАС = а, если цепь находится в равновесии.
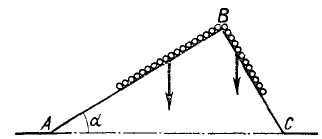
Рис. 229
Решение. Рассмотрим равновесие цепи. На цепь действуют две активные силы: 1) вес 100γ части, расположенной на АВ, н 2) вес 70γ части, расположенной на ВС, где γ—вес единицы длины цепи. Реакции связей нас не интересуют, так как они не входят в уравнение (254). Перемещением, не нарушающим связей, является скольжение цепи (вверх или вниз) по плоскости. Даем системе виртуальное перемещение δs вдоль плоскостей. Сумма элементарных работ сил тяжести на этом перемещении равна нулю, и условие равновесия цепи напишем в следующем виде:

откуда
Ответ. tg а = 0,70; а = 35°.
Задача №10
В представленном на чертеже (рис. 230) механизме ABDE — параллелограмм, составленный из стержней, соединенных шарнирами, из которых 4 и E неподвижны. Стержень ABC представляет одно целое. Точка C и ползушка М соединены нитью СМ. В точке В к механизму приложена сила Q, направленная вдоль стержня BD. К ползушке М приложена сила Р, перпендикулярная к BD. Весом частей пренебрегаем. Установить, какова связь между силами P и Q при равновесии.
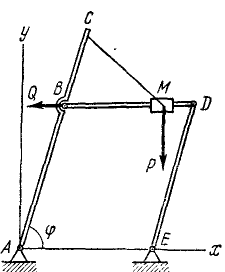
Рис. 230
Решение. Рассматриваем равновесие всего механизма. На механизм действуют активные силы Q и Р. Условие равновесия механизма запишем в Форме общего уравнения (255) статики. Оси координат даны на рисунке. Длина AB = l.
При решении задач по (255) удобно составлять следующую таблицу:
| № | Сила | X | Y | x | y | δx | δy |
| 1 | Q | -Q | 0 | l cos φ | l sin φ | — l sin φ δφ | l cos φ δφ |
| 2 | P | 0 | -P |
Сначала заносим в таблицу все активные силы (2-й столбец), затем в столбцы 3-й и 4-й—их проекции на оси координат, затем в столбцы 5-й и 6-й заносим координаты точек приложения -сил, а в столбцы 7-й и 8-й —вариации этих координат. Если система имеет три измерения, то таблица пополняется соответствующими столбцами для г. Таблица предназначена для решения задачи по уравнению (255), поэтому если в 3-м или 4-м столбцах имеются 0, то заполнять соответствующие строки в столбцах 5, 6, 7 и 8-м излишне.
Внося в (255) данные из таблицы, получим

Ответ. 
Сколько выиграно в силе, столько потеряно в скорости
Применение принципа виртуальных перемещений к простейшим машинам
Простейшими машинами здесь названы машины или механизмы с полными связями, т. е. такие, в которых положение всех частей полностью определяется положением одной из точек. Положение всех звеньев такого механизма может быть определено посредством только одного параметра, называемого обобщенной координатой механизма, фиксирующего положение некоторой точки на ее траектории или значение угла поворота звена.
Рассмотрим такой механизм, находящийся под действием двух сил: движущей силы Р, приложенной в точке А, и силы сопротивления R, приложенной в точке В. Сообщим звеньям механизма некоторое бесконечно малое перемещение. Пусть в этом перемещении υA и υB—проекции скоростей точки А на направление силы P и точки В на направление силы R. Тогда получим следующее условие равновесия механизма:

откуда
Из этой пропорции видно, что движущая сила и сила сопротивления находятся между собой в отношении, обратном отношению проекций скоростей их точек приложения на направления этих сил.
Это условие выражает золотое правило механики, известное еще древним грекам, оно было сформулировано Тероном, а после Галилеем в следующих словах: сколько выиграно в силе, столько потеряно в скорости.
Если пренебречь трением, то это правило можно приложить ко многим механизмам и простейшим машинам: к рычагам, блокам, полиспастам, зубчатым колесам, различным типам весов, домкратам и т. д. и т. п.
Задача №11
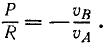
Плоский шарнирный механизм («пантограф») имеет показанное на чертеже устройство (рис. 231). Стержни AD, ВС, ... невесомы и образуют ряд ромбов. OK — пружинные весы. Найти, сколько показывают весы, если внизу подвешен груз Q.
Рис. 231
Решение. Дадим точке M элементарное перемещение δh вниз. Тогда точка K получит перемещение  тоже вниз.
тоже вниз.
Обозначая силу натяжения пружины (показание весов) через F, составим и приравняем нулю сумму элементарных работ всех активных сил системы:
из этого равенства находим F = 3Q.
Ответ. Показание весов nQ, где n—число ромбов, в данном случае n = 3.
Задача №12
В шарнирном параллелограмме OABC (рис. 232), расположенном в вертикальной плоскости, длина кривошипа 0A = 20 см. Шатун AB весит G = AOh. Пренебрегая весами кривошипов, найти величину момента М, приложенного к кривошипу OA, при условии, что механизм находится в равновесии в указанном на чертеже положении.
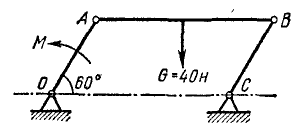
Рис. 232
Решение. Дадим системе виртуальное перемещение, мысленно повернув кривошип OA на угол δφ; тогда, по (223), (224) и (254) Какую горизонтальную силу R надо приложить к правой нижней трубе, чтобы удержать трубы в равновесии? Сила пересекает ось трубы. Радиус сечения труб r, вес каждой трубы Р; линии, соединяющие центры сечений, образуют равнобедренный треугольник с углом α при основании.
Решение. Рассматриваем равновесие системы, состоящей из трех труб. На систему действуют веса труб, приложенные в их центрах тяжести А, В и С, и горизонтальная сила, которую мы переносим (в пределах твердого тела, к которому она приложена) в точку С. Реакции нас не интересуют, так как задачу будем решать, применяя принцип виртуальных перемещений.
Если правой нижней трубе сообщить виртуальное перемещение вдоль оси абсцисс, то виртуальную работу совершат только две силы: сила R, приложенная к нижней трубе в точке С, и вес верхней трубы, приложенный в точке В. Определим проекции этих сил:

Для точек C и B определим нужные нам координаты и их вариации:


Подставляем найденные величины в (255):

Сокращаем на 2r δa и находим ответ.
Ответ. 
Задача №13
Верхний конец А однородного бруса AB (рис. 234), длина которого 21, упирается в гладкую вертикальную стену. К нижнему концу В бруса привязана веревка ВС, длина которой 2L, а верхний конец укреплен на стене в точке C- Определить положение равновесия бруса.
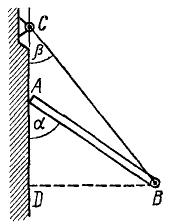
Рис. 234
Решение. На стержень действует только одна активная сила—его собственный вес G. Виртуальным перемещением системы является мысленное малое перемещение точки А вверх или вниз по стене. При этом меняются высота центра тяжести бруса, угол α, составляемый брусом с вертикальной стеной, и угол β между веревкой и вертикальной стеной.
Обозначим через z расстояние по вертикали центра тяжести бруса от точки С. Тогда
z = 2Lcos β-1 cos а.
Находим вариации, считая г, а и β переменными параметрами:
δz = — 2L sin β δβ + l sin α δα.
Работа всех (в данном случае одной) активных сил системы при ее виртуальном перемещении равна нулю:
G δz = G (l sin α δa-2L sin β δβ) = 0.
Но вес бруса пулю не равен, следовательно,
I sin α δa= 2L sin β δβ.
Как видно из чертежа,
BD = 2l sin α = 2L sin β.
Из этого равенства после варьирования находим
21 cos αδα = 2L cos βδβ.
Делим на него равенство, полученное из уравнения равновесия:
Следовательно,
Ответ. AC = AD независимо от угла наклона стержня.
Задача №14
При каком соотношении между весами P1, P2, P3 и Pt грузов А, В, C и D система, изображенная на рис. 235, будет находиться в равновесии? Нить невесома и нерастяжима, трением пренебречь.
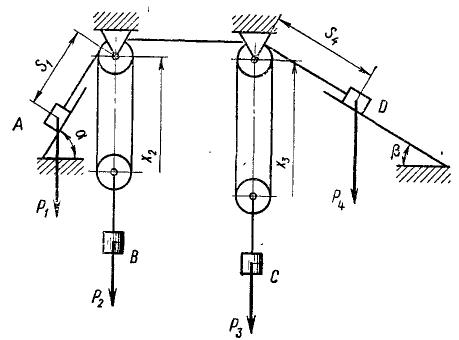
Рис. 235
Решение. Пусть длины s1, x2, x3, s4 определяют положения грузов А, В, C и D. Пусть каждый груз получит виртуальное перемещение. Возьмем сумму виртуальных работ всех активных сил системы, т. е. сил тяжести:

Из условия нерастяжимости нити имеем:
s1 + 2x2 + 2x3 + s4 = const.
Отсюда:
δs1 + 2δx2 + 2δx3 + δs4 = 0.
Этим соотношением четыре вариации связаны между собой, а потому только трем из них можно давать независимые друг от друга значения, например трем первым, а четвертая определится из полученного соотношения:
δs4 = — (δs1 + 2δx2 + 2δx3).
Подставим это значение δs4 в уравнение равновесия:
(P1 sin a-P4 sin β) δsl + (P2-2P4 sin β) δx2 + (P3-2P4 sin β) δx3 = 0.
Вариации δs1, δx2 и δx3 независимые величины и могут принимать различные значения, а потому написанное равенство может тождественно равняться нулю только при условии, что равны нулю все коэффициенты при вариациях. Приравнивая каждую из скобок'нулю, найдем ответ.
Ответ. P2 = P3 = 2P4 sin β; P1 sin α = P4 sin β.
Во всякой механической системе с идеальными связями сумма элементарных работ всех активных сил и сил инерции на всяком виртуальном перемещении равна нулю:

Общее уравнение динамики. Если механическая система с идеальными связями не находится в равновесии, то, приложив к каждой точке силы инерции, мы можем согласно принципу Д’Аламбера рассматривать эту систему как находящуюся в данное мгновение в равновесии и применять к ней все уравнения статики и, в частности, уравнение (254).
В самом деле, для каждой точки системы
Но если равна нулю равнодействующая всех активных сил, реакций связей и сил инерции, приложенных к каждой точке, то равна нулю и сумма элементарных работ всех сил, приложенных к каждой точке, а потому равна нулю и сумма элементарных работ всех сил системы:

Если связи системы идеальные, то сумма работ реакций связей на всяком виртуальном перемещении тождественно равняется нулю и в написанном равенстве средняя сумма отпадает:
 (256)
(256)
Следовательно, во всякой системе с идеальными связями на всяком виртуальном перемещении сумма работ всех активных сил и всех сил инерции равна нулю. В частном случае, если система находится в равновесии, силы инерции системы равны нулю, и мы получаем (254).
Это уравнение (256) обычно пишут в так называемой аналитической форме, в которой оно особенно удобно при различных применениях. Обозначая проекции активных сил системы на оси координат Xk, Yk и Zk, представляя проекции сил инерции каждой частицы как произведение массы частицы на проекции ускорения с обратным знаком (—mkxk, —mkyk и —mkzk) и обозначая через δxk, δyk и δzk проекции виртуальных перемещений, мы можем выразить элементарные работы по (221), тогда получим
 (257)
(257)
Уравнение (257) называют общим уравнением динамики системы с идеальными связями.
Задача №15
Центробежный регулятор Уатта (рис. 236, а) вращается вокруг вертикальной оси с постоянной угловой скоростью ω. Определить угол отклонения ручек OA и OB от вертикали, принимая во внимание только вес P каждого из шаров А и В и вес P1 муфты С; все стержни имеют одинаковую длину.
Решение. Составим общее уравнение динамики для центробежного регулятора. К трем действующим на регулятор активным силам (к весу муфты и шаров) добавим еще силы инерции. Регулятор вращается равномерно, и имеются только две силы инерции — центробежные силы шаров. Для решения задачи составим таблицу, аналогичную той, какую мы составили пои решении задачи № 182. Построим координатные оси (рис. 236, б), спроецируем на них силы, найдем координаты точек приложения сил и их вариации.
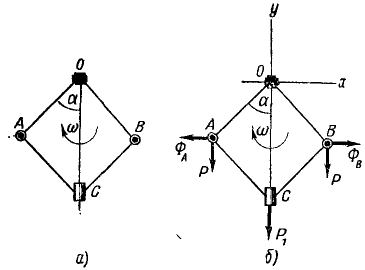
Рис. 236
| № | Сила | X | Y | x | y | δx | δy |
| 1 | PA | 0 | -P | —l cos a | l sin a δa | ||
| 2 | PB | 0 | -P | —l cos a | l sin a δa | ||
| 3 | P1 | 0 | -PI | —2l cos a | 2l sin a δa | ||
| 4 | ФА |  |
0 | —l sin a | —l cos a δa | ||
| 5 | ФВ |  |
0 | l sin a | +l cos a δa |
Найденные значения проекций сил и приращений координат точек их приложения внесем в уравнение (256):

Полагаем, что a ≠ 0, и сокращаем все члены уравнения на 2l sin aδa:

откуда определяем угол отклонения ручек. Ответ.
Для работы регулятора необходимо условие  , так как cos α < 1.
, так как cos α < 1.
Задача №16
Решить задачу по принципу виртуальных перемещений. (Ср. решения этой же задачи другими методами: № 146 стр. 350, № 167 стр. 387, № 179 стр. 412, № 193 стр. 434).
Решение. На систему действует активный момент M1 = 50kΓм. Сила F взаимного давления валов вызвана связью и в уравнение (256) не входит. Добавляем моменты сил инерции J1εl и J2ε2, причем  . Даем системе виртуальное перемещение, повернув первый вал на δφ1. Тогда второй вал получит
. Даем системе виртуальное перемещение, повернув первый вал на δφ1. Тогда второй вал получит
перемещение  . Сумма элементарных работ всех активных сил и сил инерции равна нулю:
. Сумма элементарных работ всех активных сил и сил инерции равна нулю:

или

δφ1 не равно нулю, поэтому, сокращая на δφ1 и подставляя заданные величины, получим
откуда
По формулам (87) равноускоренного вращения определим время, в течение которого второй вал разовьет угловую скорость ω2=4π, и число оборотов, сделанное валом за это время.
Ответ. n2 = 2,344 оборота.
Задача №17
Два груза —M1 весом Gl = 20κГ и M2 весом G2 = 34 кГ— подвешены на двух гибких нерастяжимых нитях, которые навернуты, как указано на чертеже (рис. 237,а), на жестко скрепленные барабаны, имеющие радиусы r1 = 5 см и r2=16 см и-насаженные на общую ось. Вес малого барабана 4 кГ, а большого—8 кГ. Массы барабана считаем равномерно распределенными по их внешним поверхностям. Определить угловое ускорение е барабанов и натяжение нитей T1 и T2.
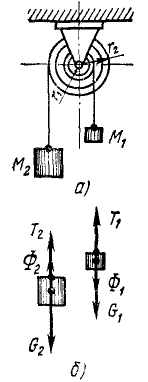
Рис. 237
Решение. На систему действуют активные силы: веса двух грузов и веса двух блоков. Груз M1 поднимается, груз M2 опускается, центр тяжести блоков неподвижен. Приложим силы инерции. Ускорение груза M2 направлено вниз и равно εr2, следовательно, сила инерции Φ2 направлена вверх и равна — εr2. Ускорение груза M1 направлено вверх; следовательно, сила инерции, прикладываемая к этому грузу, направлена
εr2. Ускорение груза M1 направлено вверх; следовательно, сила инерции, прикладываемая к этому грузу, направлена
вниз и равна —  εr1.
εr1.
Нормальные ускорения материальных частиц блоков нас не интересуют, потому что эти ускорения перпендикулярны к скорости и работа центробежных сил инерции равна нулю. Касательное ускорение каждой из частиц большого блока равно εr2, а малого блока равно εr1 и направлено против хода часовой стрелки; касательные силы инерции приложены в каждой частице блоков и направлены по ходу стрелок часов.
Даем системе виртуальное перемещение — мысленно поворачиваем блоки с грузами вокруг оси О па угол δφ. Будем для определенности считать, что мы повернули систему против хода часовой стрелки. Тогда груз М2 получит виртуальное перемещение вниз r2δφ, груз M1 получит виртуальное перемещение вверх, равное r1δφ.
Вычисление работы сил тяжести и сил инерции грузов не требует пояснений. Работу касательных сил инерции блоков определим по (224). Умножая вектор касательного ускорения εr каждой частицы блока на массу m частицы и изменив направление па обратное, получим силы инерции частиц. Умножая на плечо r и суммируя моменты сил инерции всех частиц, найдем главный момент касательных сил инерции блока относительно оси вращения:

Мы получили уже известную нам важную в технике формулу: момент касательных сил инерции вращающегося тела относительно оси вращения равен произведению момента инерции тела относительно той же оси и взятого с обратным знаком углового ускорения тела.
По условию этой задачи, масса блоков распределена по их внешним поверхностям. Следовательно, виртуальная работа сил инерции большого блока
и малого
Составим сумму элементарных работ всех активных сил и всех сил инерции на данном виртуальном перемещении и приравняем эту сумму нулю:

Сокращая на δφ, определяем ε:
В задаче требуется еще определить натяжение нитей. Натяжения нитей (как силы связи) не вошли в написанное нами уравнение. Чтобы определить натяжение нити Т, применим следующий метод.
Разрежем эту нить, отбросим часть системы, но, чтобы не упал груз, заменим нить силой Т, равной натяжению нити, и уравновесим груз, приложив силы инерции и написав уравнения равновесия (сумму' проекций сил на ось ординат).
Уравнение равновесия груза M1 (рис. 237, б):

откуда T1 = 25 кГ.
Уравнение равновесия груза M2:

откуда T2= 17 кГ.
Этот метод аналогичен методу, применяемому в статике для определения внутренних усилий в стержнях фермы (см. задачу № 25 на стр. 89). Его называют методом РОЗУ по первым буквам слов, выражающих производимые действия (разрежем, отбросим, заменим, уравновесим).
Ответ. ε = 49 ceκ-2; T1 = 25κΓ; T2=17κΓ.
| Рекомендую подробно изучить предмет: |
| Ещё лекции с примерами решения и объяснением: |