
Сложение движений точки в теоретической механике
Сложение движений точки:
Рассмотрим сложение движений точки, т. е. такие случаи, когда точка участвует в нескольких движениях одновременно.
Примерами сложения движений могут служить движение пассажира по движущемуся пароходу, движение ползуна в механизме по подвижной направляющей и пр.
При изучении сложения движений точки М введем в рассмотрение основную (иначе говоря, абсолютную или неподвижную) систему отсчета в виде неподвижных координатных осей 
Пусть теперь тело А (неизменяемая среда), с которой скреплены и вместе с ней движутся оси координат 
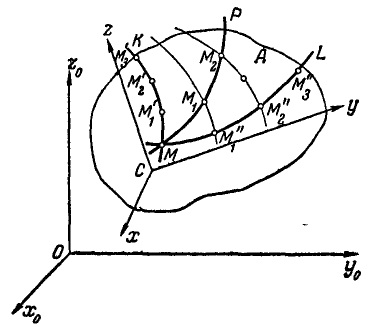
Рис.211.
Допустим, далее, что в среде, в свою очередь, движется точка М, которая участвует в двух движениях — относительном по отношению к среде (или по отношению к осям координат  ) и в переносном вместе со средой, т. е. вместе с осями
) и в переносном вместе со средой, т. е. вместе с осями  .
.
Относительным движением точки М называется движение ее по отношению к подвижной системе отсчета  (к среде).
(к среде).
Для исследования относительного движения точки М следует подвижные оси  закрепить неподвижно и при этом условии рассмотреть движение точки М по неподвижной теперь среде.
закрепить неподвижно и при этом условии рассмотреть движение точки М по неподвижной теперь среде.
Переносным движением точки М называется движение ее, происходящее вместе с движением подвижной системы отсчета  (среды) по отношению" к неподвижной системе отсчета
(среды) по отношению" к неподвижной системе отсчета  .
.
Для исследования переносного движения точки М точку следует скрепить с движущейся средой и рассмотреть движение ее по отношению к неподвижным осям  .
.
Абсолютным движением точки М называется движение ее относительно основной системы отсчета, т. е. неподвижных осей  .
.
Абсолютное движение точки М получается в результате сложения движений относительного и переносного. В самом деле, пусть за промежутки времени  точка М (рис. 211), двигаясь по относительной траектории К, занимает на ней ряд последовательных положений
точка М (рис. 211), двигаясь по относительной траектории К, занимает на ней ряд последовательных положений  ; но за эти промежутки времени ее относительная траектория, двигаясь вместе со средой, будет занимать ряд последовательных положений
; но за эти промежутки времени ее относительная траектория, двигаясь вместе со средой, будет занимать ряд последовательных положений  на переносной траектории L. Абсолютная траектория точки М пройдет через точки
на переносной траектории L. Абсолютная траектория точки М пройдет через точки  , которые получим, если на относительной траектории отложить дуги
, которые получим, если на относительной траектории отложить дуги 
При  точки
точки  образуют плавную кривую.
образуют плавную кривую.
Таким образом, абсолютное движение точки является составным из относительного и переносного движений.
Докажем теперь следующую теорему:
Скорость абсолютного движения точки равна геометрической сумме скоростей переносного и относительного движений.
Пусть имеются неподвижная система отсчета  и подвижная система
и подвижная система  , связанная со средой. Тогда положение точки М, движущейся по отношению к среде, определяется по отношению к неподвижной системе радиусом-вектором
, связанная со средой. Тогда положение точки М, движущейся по отношению к среде, определяется по отношению к неподвижной системе радиусом-вектором  , а по отношению к подвижной системе — радиусом-вектором
, а по отношению к подвижной системе — радиусом-вектором  ; положение точки С среды по отношению к неподвижным осям определяется радиусом-вектором
; положение точки С среды по отношению к неподвижным осям определяется радиусом-вектором  (рис. 212).
(рис. 212).
Из чертежа имеем: 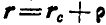 , но так как:
, но так как:

то можно написать:

На основании равенств (72) и (119) найдем, что скорость абсолютного движения точки М:

Первое слагаемое равенства (120) представляет собой скорость точки С. Второе слагаемое — это производная по времени от  в предположении, что координаты х, у и z точки М постоянные. Поэтому второе слагаемое есть скорость точки М среды по отношению к точке С.
в предположении, что координаты х, у и z точки М постоянные. Поэтому второе слагаемое есть скорость точки М среды по отношению к точке С.
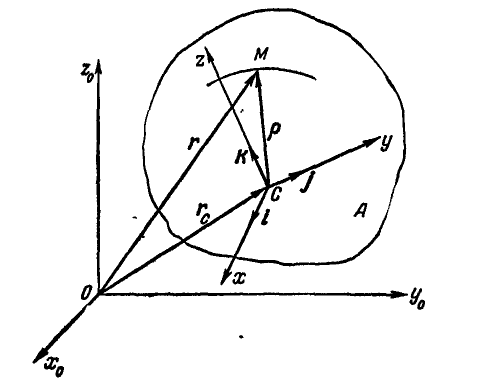
Рис. 212.
Следовательно, первые два слагаемых представляют скорость переносного движения  точки среды, совпадающей с точкой М.
точки среды, совпадающей с точкой М.
Третье слагаемое — производная от  в предположении, что i, j и k постоянные величины. Это скорость относительного движения
в предположении, что i, j и k постоянные величины. Это скорость относительного движения  точки М по отношению к осям Cxyz. Поэтому окончательно имеем:
точки М по отношению к осям Cxyz. Поэтому окончательно имеем:

Задача №1
Мотовило состоит из шести планок, расположенных на поверхности цилиндра радиусом R на равном расстоянии одна от другой (рис. 213). Планки, связанные в одно целое, вращаются равномерно с угловой скоростью  вокруг геометрической оси О цилиндра, которая, в свою очередь, перемещается с постоянной горизонтальной скоростью
вокруг геометрической оси О цилиндра, которая, в свою очередь, перемещается с постоянной горизонтальной скоростью  . Найти проекции абсолютной скорости
. Найти проекции абсолютной скорости  и
и  на координатные оси и уравнения абсолютного движения центра какой-либо планки А.
на координатные оси и уравнения абсолютного движения центра какой-либо планки А.
Рис. 213.
Решение. Каждая планка мотовила участвует в двух движениях — относительном вращении вокруг оси О и в переносном движении вместе с осью О. Относительная траектория любой планки — окружность радиуса R. Проведя координатные оси х и у через точку М, расположенную на левом конце горизонтального диаметра, найдем уравнения относительного движения центра планки А:
Отсюда находим проекции относительной скорости точки А на координатные оси:
Для нахождения проекций  и
и  абсолютной скорости точки А на координатные оси следует в проекциям скорости
абсолютной скорости точки А на координатные оси следует в проекциям скорости  и
и  относительного движения точки прибавить проекции скорости
относительного движения точки прибавить проекции скорости  и
и  переносного ее движения. Но так как
переносного ее движения. Но так как  и
и  , то:
, то:
Отсюда уравнения абсолютного движения планки определятся:

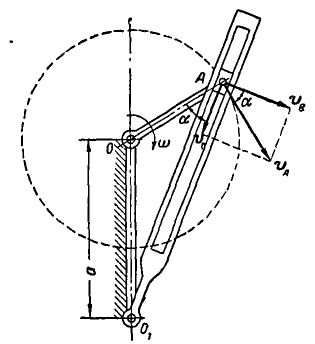
Рис. 214.
Задача №2
Механизм (рис. 214) состоит из кривошипа ОА и качающейся кулисы  , могущих вращаться вокруг параллельных валов О и
, могущих вращаться вокруг параллельных валов О и  .
.
Конец А кривошипа соединен с ползуном, скользящим вдоль прореза кулисы. Зная, что кривошип вращается с постоянной угловой скоростью  и что длины
и что длины  , определить:
, определить:
1) угловую скорость  вала
вала  , в зависимости от расстояния
, в зависимости от расстояния  ;
;
2) наибольшее и наименьшее значение угловой скорости ;
3) те положения кривошипа, когда  .
.
Решение. Для нахождения  , исследуем движение точки А. С одной стороны, это движение можно рассматривать как движение, происходящее по окружности с абсолютной скоростью
, исследуем движение точки А. С одной стороны, это движение можно рассматривать как движение, происходящее по окружности с абсолютной скоростью 
 . С другой стороны, точка А участвует в двух движениях — переносном вместе с кулисой, имея переносную скорость
. С другой стороны, точка А участвует в двух движениях — переносном вместе с кулисой, имея переносную скорость 
 , и в относительном вдоль прорези со скоростью
, и в относительном вдоль прорези со скоростью  .
.
Далее,  , или
, или  , отсюда:
, отсюда:
Из  находим
находим  , откуда:
, откуда:
Следовательно:

Угловая скорость  будет иметь наибольшее значение при
будет иметь наибольшее значение при  , а наименьшее при
, а наименьшее при  ; поэтому:
; поэтому:
Из общего выражения для  , находим, что
, находим, что
а для этого необходимо, чтобы  , или
, или  , но это будет, когда
, но это будет, когда  .
.
При нахождении абсолютного ускорения точки, участвующей в двух движениях, различают два случая:
1) когда среда (или подвижная система отсчета) совершает поступательное движение,
2) когда среда совершает вращательное движение.
Рассмотрим сначала первый случай.
Здесь оси  , связанные со средой (рис. 212), движутся параллельно самим себе и поэтому единичные векторы этих осей
, связанные со средой (рис. 212), движутся параллельно самим себе и поэтому единичные векторы этих осей не изменяют своего направления. Следовательно, на основании равенств (79) и (119) абсолютное ускорение точки М будет:
не изменяют своего направления. Следовательно, на основании равенств (79) и (119) абсолютное ускорение точки М будет:

Первое слагаемое правой части последнего равенства представляет собой ускорение точки С среды, т. е. переносное ускорение  ; второе слагаемое, стоящее в скобках, — ускорение точки М по отношению к осям
; второе слагаемое, стоящее в скобках, — ускорение точки М по отношению к осям  , т. е. относительное ускорение
, т. е. относительное ускорение  , следовательно:
, следовательно:

Отсюда следует, что при поступательном движении среды абсолютное ускорение точки равно геометрической сумме ускорений переносною и относительного движений.
Найдем теперь абсолютное ускорение точки М в том случае, когда среда совершает вращательное движение. В этом случае на основании равенств (79) и (120) получим абсолютное ускорение точки М (рис. 212):
В правой части последнего равенства первое слагаемое представляет собой ускорение точки С среды.
Второе слагаемое является второй производной от  , определяемого равенством (118) в предположении, что координаты точки М по отношению к осям
, определяемого равенством (118) в предположении, что координаты точки М по отношению к осям  постоянны. Следовательно, второе слагаемое — это ускорение точки среды, совпадающей с точкой М, по отношению к точке С.
постоянны. Следовательно, второе слагаемое — это ускорение точки среды, совпадающей с точкой М, по отношению к точке С.
Поэтому первое и второе слагаемое вместе дают ускорение точки среды, совпадающей с точкой М, т. е. ускорение переносного движения  .
.
Третье слагаемое представляет собой вторую производную от  в предположении, что единичные векторы
в предположении, что единичные векторы  не изменяют своего направления, что характеризует движение точки М по отношению к среде. Следовательно, третье слагаемое есть относительное ускорение точки по отношению к среде —
не изменяют своего направления, что характеризует движение точки М по отношению к среде. Следовательно, третье слагаемое есть относительное ускорение точки по отношению к среде —  .
.
Преобразуем несколько четвертое слагаемое. На основании равенства (100) сможем написать:

отсюда:

Обозначая

будем иметь:

Итак, в общем случае абсолютное ускорение точки равно геометрической сумме трех ускорений — переносного, относительного и поворотного.
В этом заключается теорема Кориолиса. Ускорение , определяемое равенством (123), называется поворотным, добавочным или кориолисовым ускорением. Его модуль определяется по формуле:
, определяемое равенством (123), называется поворотным, добавочным или кориолисовым ускорением. Его модуль определяется по формуле:

Из равенства (125) следует, что поворотное ускорение обращается в нуль в двух случаях:
1) когда  , т. е. среда движется поступательно, и
, т. е. среда движется поступательно, и
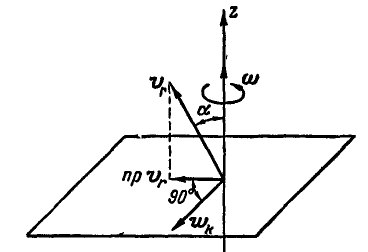
Рис. 215.
2) когда  , т. е. если относительная скорость
, т. е. если относительная скорость  точки М параллельна оси вращения среды.
точки М параллельна оси вращения среды.
Направление ускорения  определяется по общему правилу векторного произведения. Для этого на основании равенства (123) следует вектор относительной скорости точки
определяется по общему правилу векторного произведения. Для этого на основании равенства (123) следует вектор относительной скорости точки  (рис. 216) спроектировать на плоскость, перпендикулярную к оси вращения среды, или, что то же, — к вектору
(рис. 216) спроектировать на плоскость, перпендикулярную к оси вращения среды, или, что то же, — к вектору  , и полученную проекцию относительной скорости повернуть на 90° в сторону вращения среды.
, и полученную проекцию относительной скорости повернуть на 90° в сторону вращения среды.
Задача №3
Тележка скатывается вниз по наклонной плоскости; ее движение в метрах и секундах выражается уравнением 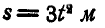 (рис. 216, а).
(рис. 216, а).
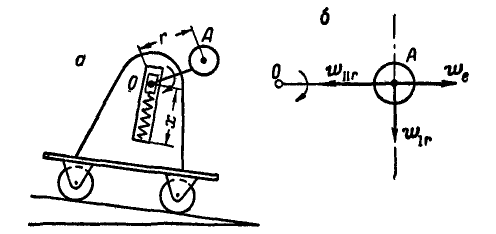
Рис. 216.
На тележке имеется ползун О, совершающий гармоническое колебательное движение в направлении, перпендикулярном наклонной плоскости, по закону  . С ползуном в точке О скреплен шарнирно стержень ОА, на конце которого насажен груз А, вращающийся вместе со стержнем вокруг точки О с угловой скоростью, соответствующей
. С ползуном в точке О скреплен шарнирно стержень ОА, на конце которого насажен груз А, вращающийся вместе со стержнем вокруг точки О с угловой скоростью, соответствующей  .
.
Найти абсолютное ускорение  груза в момент
груза в момент  , когда точка А расположена в крайнем правом положении, а стержень OA параллелен наклонной плоскости. Величина ОА = г= 0,2 м.
, когда точка А расположена в крайнем правом положении, а стержень OA параллелен наклонной плоскости. Величина ОА = г= 0,2 м.
Решение. Груз участвует в трех движениях: в переносном— вместе с тележкой, в относительном поступательном — вместе с ползуном О по отношению к тележке и в относительном вращательном — по отношению к оси  .
.
Обозначим ускорения, соответствующие этим движениям груза А, через  ; тогда абсолютное его ускорение найдется по формуле (122):
; тогда абсолютное его ускорение найдется по формуле (122):

Величина каждого из этих ускорений определится:
При 
Построение векторов  показано на рисунке 216,6. Величина абсолютного ускорения точки будет:
показано на рисунке 216,6. Величина абсолютного ускорения точки будет:

Задача №4
Движение центра цилиндра радиусом  в метрах и секундах выражается уравнением:
в метрах и секундах выражается уравнением:  . Через цилиндр перекинута нить, к концам которой прикреплены два груза А и В (рис. 217). Предполагая, что при движении цилиндра нить сматывается с цилиндра и наматывается на него без скольжения, определить абсолютные ускорения
. Через цилиндр перекинута нить, к концам которой прикреплены два груза А и В (рис. 217). Предполагая, что при движении цилиндра нить сматывается с цилиндра и наматывается на него без скольжения, определить абсолютные ускорения  и
и  грузов А и В.
грузов А и В.
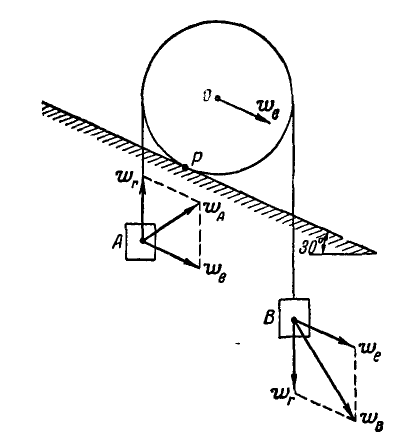
Рис. 217.
При решении задачи считать, что грузы раскачиваться не могут.
Решение. Каждый из грузов участвует в двух движениях: в переносном с ускорением  и в относительном по отношению к центру цилиндра с ускорением
и в относительном по отношению к центру цилиндра с ускорением  .
.
Угловая скорость мгновенного вращения цилиндра:

откуда 
и, следовательно:

Абсолютные ускорения  и
и  грузов А и В найдутся по правилу параллелограмма:
грузов А и В найдутся по правилу параллелограмма:

Задача №5
По окружности диска радиусом  в противоположную сторону его вращения движется точка М с постоянной относительной скоростью
в противоположную сторону его вращения движется точка М с постоянной относительной скоростью  (рис. 218).
(рис. 218).
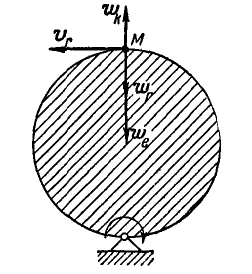
Рис. 218.
Диск вращается вокруг оси, проходящей через точку О перпедикулярно плоскости чертежа в направлении, указанном стрелкокй, делая 
Найти полное ускорение  точки М.
точки М.
Решение. Так как среда (диск) вращается вокруг неподвижной оси, то абсолютное ускорение точки М равно геометрической сумме трех ускорений (124), из которых:
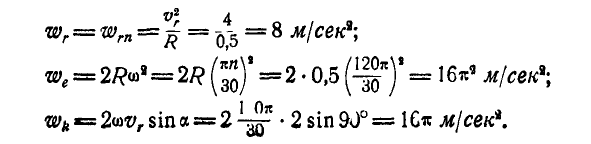
Исходя из направления ускорений (рис. 218), находим:

Задача №6
Полое кольцо радиуса  вращается с постоянной угловой скоростью
вращается с постоянной угловой скоростью  вокруг оси, проходящей через точку О, перпендикулярно к плоскости чертежа. Кольцо заполнено жидкостью, движущейся в нем против стрелки часов с относительной скоростью
вокруг оси, проходящей через точку О, перпендикулярно к плоскости чертежа. Кольцо заполнено жидкостью, движущейся в нем против стрелки часов с относительной скоростью  (рис. 219).
(рис. 219).
Определить величины и направления абсолютных ускорений частиц жидкости, расположенных в точках 1, 2, 3 и 4.
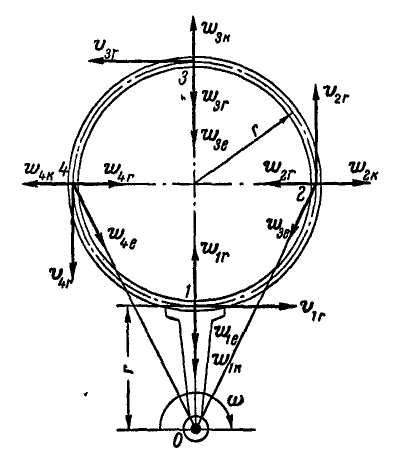
Рис. 219.
Решение. Так как движение среды (кольца) вращательное, то абсолютное ускорение частицы жидкости в любом положении 1, 2, 3 и 4 будет равно:  .
.
Векторы ускорений  ,
,  и для частиц жидкости в каждом положении 1, 2, 3 и 4 построены на рисунке 219.
и для частиц жидкости в каждом положении 1, 2, 3 и 4 построены на рисунке 219.
Величины составляющих абсолютного ускорения частиц жидкости в положениях 1, 2, 3 и 4 будут:
Нетрудно видеть, что абсолютные ускорения в точках 1, 2, 3 и 4 направлены в рассматриваемом положении кольца по вертикали вниз и равны по величине:

Задача №7
На рисунке 220 изображена лопатка центробежного водяного насоса, имеющая очертание дуги окружности с центром в точке В, расположенной на одной горизонтали с осью вращения насоса О.
Определить абсолютное ускорение частицы А воды, движущейся по лопатке с относительной скоростью  и относительным тангенциальным ускорением
и относительным тангенциальным ускорением  . Угловая скорость насоса
. Угловая скорость насоса  и
и  .
.
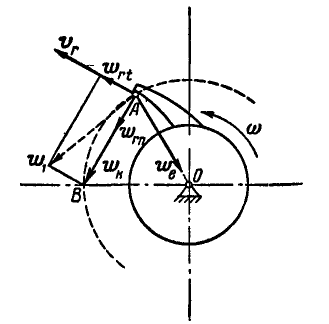
Рис. 220.
Решение. Лопатка насоса совершает вращательное движение, поэтому абсолютное ускорение частицы А равно геометрической сумме трех ускорений:

причем

где по условию:
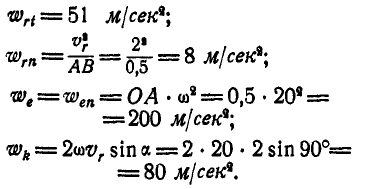
Векторы всех составляющих абсолютного ускорения частицы показаны на рисунке 220. Заменим сначала ускорения  и
и  одним ускорением
одним ускорением  , величина которого:
, величина которого:

Так как величина  в два раза меньше
в два раза меньше  , то угол между векторами
, то угол между векторами  и
и  , или, что то же, между
, или, что то же, между  и
и  , равен 30°. Отсюда заключаем, что угол между векторами
, равен 30°. Отсюда заключаем, что угол между векторами  и
и  равен 90°.
равен 90°.
Поэтому величина абсолютного ускорения точки А:

Задача №8
При изменении угловой скорости маховика стержень регулятора  поворачивается вокруг оси
поворачивается вокруг оси  . Маховик, вращающийся с угловой скоростью
. Маховик, вращающийся с угловой скоростью  , получает мгновенное угловое ускорение
, получает мгновенное угловое ускорение  . При этом стержень
. При этом стержень  имеет угловое ускорение
имеет угловое ускорение  и относительная скорость точки А равна
и относительная скорость точки А равна  (рис. 221). Определить абсолютное ускорение точки А центра груза регулятора в момент, когда оси вращения
(рис. 221). Определить абсолютное ускорение точки А центра груза регулятора в момент, когда оси вращения  и О регулятора и маховика расположены на одной вертикали, если
и О регулятора и маховика расположены на одной вертикали, если  и
и  .
.
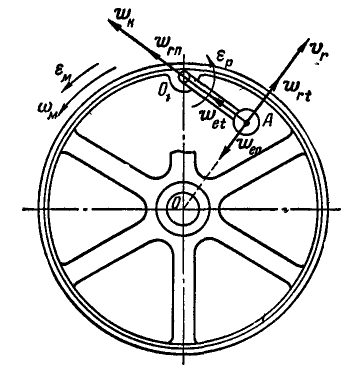
Рис. 221.
Решение. Движение среды (маховика) вращательное, а поэтому абсолютное ускорение точки А:

Величины составляющих абсолютного ускорения точки А при  будут:
будут:
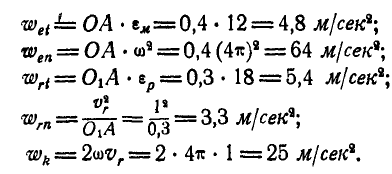
Векторы всех вычисленных составляющих абсолютного ускорения точки А построены на рисунке 221.
Из чертежа находим, что величина абсолютного ускорения точки А составляет:

Задача №9
Для очистки картофеля от почвы во время его уборки вся масса вместе с почвой поступает в чашевую центрифугу; последняя имеет форму усеченного конуса и вращается вокруг вертикальной оси с угловой скоростью  .
.
Боковая поверхность центрифуги состоит из стальных прутьев, совпадающих с образующими конуса, вдоль которых перемещаются клубни картофеля (рис. 222).
Рассматривая клубень А как материальную точку и зная, что движение его в метрах и секундах выражается уравнением  , определить полное ускорение клубня в момент
, определить полное ускорение клубня в момент  , если известно, что образующая конуса составляет с его осью угол
, если известно, что образующая конуса составляет с его осью угол  .
.
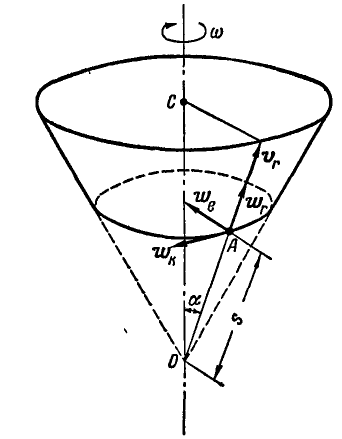
Рис. 222.
Решение. Так как прямая ОА, вдоль которой движется клубень, вращается вокруг оси ОС, то полное ускорение точки А равно геометрической сумме трех ускорений: относительного, переносного и поворотного. Относительное ускорение:
 , так как
, так как  .
.
Переносное ускорение:
где  —расстояние точки А от оси вращения. К моменту t это расстояние будет:
—расстояние точки А от оси вращения. К моменту t это расстояние будет:

откуда:

направлено это ускорение от А к оси конуса. Поворотное ускорение:

оно направлено перпендикулярно к  в сторону вращения конуса. При
в сторону вращения конуса. При  ;
;  ;
;  ;
;  . Заменим сначала векторы
. Заменим сначала векторы  и
и  одним результирующим вектором
одним результирующим вектором  . По теореме косинусов найдем:
. По теореме косинусов найдем:

Так как векторы  и
и  взаимно перпендикулярны, то полное ускорение точки А будет:
взаимно перпендикулярны, то полное ускорение точки А будет:

Задача №10
Механизм качающейся паровой машины (рис. 223) состоит из кривошипа OA, вращающегося вокруг точки О с постоянной угловой скоростью  , и стержня AD, соединенного шарнирно с кривошипом и скользящего внутри муфты В, могущей вращаться. Определить скорость и ускорение точки прямой AD, совпадающей с точкой В, а также радиус кривизны траектории этой точки.
, и стержня AD, соединенного шарнирно с кривошипом и скользящего внутри муфты В, могущей вращаться. Определить скорость и ускорение точки прямой AD, совпадающей с точкой В, а также радиус кривизны траектории этой точки.
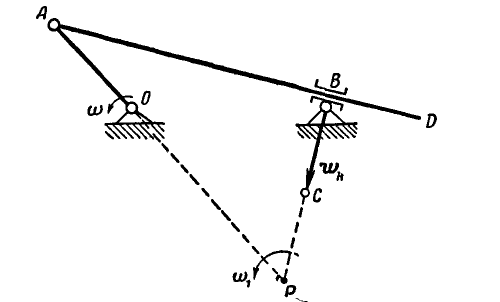
Рис. 223.
Решение. Плоскость, вращающаяся вокруг В. является подвижной системой (средой), а прямая AD —относительной траекторией точки В.
Так как точка среды, совпадающая с В, находятся в покое, то  , поэтому абсолютная и относительная скорости точки В совпадают:
, поэтому абсолютная и относительная скорости точки В совпадают:  .
.
Переносное ускорение точки В равно нулю, поэтому по формуле (124) имеем:  .
.
Проектируя это равенство на направление BP, замечаем, что  .
.
Но так как
то
Отсюда находим радиус кривизны  траектории точки В:
траектории точки В:
Следовательно, центр кривизны С делит пополам отрезок BP.
| Рекомендую подробно изучить предмет: |
| Ещё лекции с примерами решения и объяснением: |
- Сложение движений твердого тела в теоретической механике - формулы и определения с примерами
- Динамика материальной точки
- Движение материальной точки
- Аналитическая статика
- Сферическое движение твердого тела
- Плоско-параллельное движение твердого тела
- Движение твердого тела, имеющего неподвижную точку
- Движение твердого тела