
Теорема кинетической энергии в теоретической механике
Теорема кинетической энергии:
Выше уже отмечалось, что действительные перемещения находятся в числе возможных в том случае, когда связи стационарны.
Если система подчинена 

Дифференцируя это уравнение в предположении, что t постоянно, найдем уравнение, которому должны удовлетворять
проекции возможных перемещений системы при наличии  связи:
связи:

Условие, которому должны удовлетворять проекции действительных перемещений, получим путем дифференцирования уравнения связи в предположении, что t изменяется:

Действительные перемещения будут находиться в числе возможных при условии, когда  . Легко видеть (см. § 31 и 39), что общее уравнение динамики при наличии двусторонних связей принимает вид:
. Легко видеть (см. § 31 и 39), что общее уравнение динамики при наличии двусторонних связей принимает вид:
При  все суммы при
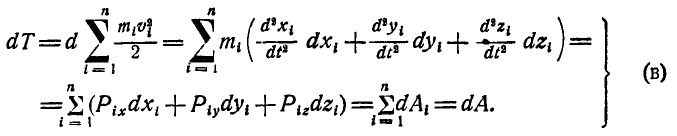
все суммы при  — нули в силу равенств (а) и (б). Вспоминая вывод теоремы кинетической энергии для точки, найдем:
— нули в силу равенств (а) и (б). Вспоминая вывод теоремы кинетической энергии для точки, найдем:
Выражение
называется кинетической энергией системы.
Мы получили следующую теорему кинетической энергии системы в дифференциальной форме: приращение кинетической энергии на бесконечно малом перемещении системы равно сумме элементарных работ всех внутренних и внешних действующих сил на этом же перемещении при связях, не зависящих от времени.
Чтобы определить изменение кинетической энергии системы при переходе ее из положения 1 в положение 2, проинтегрируем обе части уравнения (в):

Здесь  — кинетическая энергия системы в крайних ее положениях.
— кинетическая энергия системы в крайних ее положениях.
Итак, при переходе системы из одного положения в другое изменение кинетической энергии системы равно сумме работ всех сил, приложенных к точкам системы.
В этом заключается теорема кинетической энергии движущейся системы.
Рассмотрим теперь движение системы, происходящее в консервативном поле.
Общее выражение силовой функции в этом случае будет:

Если система находится только под действием консервативных сил, то, как мы знаем, элементарная работа этих сил выражается полным дифференциалом силовой функции:

Уравнение (186), выражающее теорему кинетической энергии, в этом случае принимает вид:

т. е. изменение кинетической энергии системы при некотором ее перемещении равно разности значений силовой функции для крайних положений системы.
Мы уже знаем, что силовая функция, взятая с обратным знаком, называется потенциальной энергией.
Полагая в уравнении (187)  , найдем:
, найдем:

или

Это уравнение и выражает закон сохранения энергии системы и читается так:
В каждый момент сумма кинетической и потенциальной энергии системы, движущейся в консервативном поле, постоянна.
Задача №1
Груз  соединен с двумя другими грузами
соединен с двумя другими грузами  и
и  при помощи нити, перекинутой через два ничтожно малых блока, расположенных на одной горизонтали и на расстоянии 2а один от другого (рис. 327). Первоначально груз удерживается посредине между блоками, а затем отпускается без начальной скорости. Принимая все три груза за материальные точки, определить величину А опускания груза , соответствующую статическому равновесию.
при помощи нити, перекинутой через два ничтожно малых блока, расположенных на одной горизонтали и на расстоянии 2а один от другого (рис. 327). Первоначально груз удерживается посредине между блоками, а затем отпускается без начальной скорости. Принимая все три груза за материальные точки, определить величину А опускания груза , соответствующую статическому равновесию.
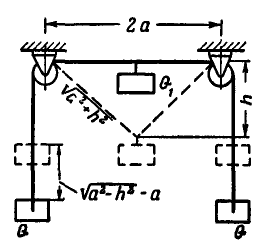
Рис. 327.
Решение. Применим теорему кинетической энергии (186), приняв за первое положение системы ее начальное положение, а за второе — то, когда груз опустится на величину h.
Кинетическая энергия системы (трех грузов) в начале и конце движения равна нулю, а поэтому из уравнения (186) следует, что должна быть также равна нулю и сумма работ, совершаемых силами  и
и  т. е.:
т. е.:

откуда
Для конечного  необходимо, чтобы было выполнено условие
необходимо, чтобы было выполнено условие
Задача №2
К концам тонкой нити, перекинутой через ролик, прикреплены два груза  и
и  , которых
, которых  свободно висит, a
свободно висит, a  может свободно скользить вдоль вертикальной направляющей (рис. 328). Груз
может свободно скользить вдоль вертикальной направляющей (рис. 328). Груз  удерживается сначала в положении
удерживается сначала в положении  , а затем опускается без начальной скорости. Считая грузы за материальные точки, определить скорость груза в зависимости от у.
, а затем опускается без начальной скорости. Считая грузы за материальные точки, определить скорость груза в зависимости от у.
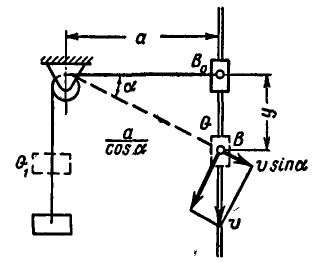
Рис. 328.
Решение. Применим теорему кинетической энергии между двумя положениями системы, когда груз Q находится в положении  и когда он находится в положении В, определяемом расстоянием у. Так как в начале кинетическая энергия системы равна нулю, то
и когда он находится в положении В, определяемом расстоянием у. Так как в начале кинетическая энергия системы равна нулю, то  , и уравнение (186) принимает вид
, и уравнение (186) принимает вид  , или
, или

Из чертежа видно, что  , а отсюда, произведя замену, найдем:
, а отсюда, произведя замену, найдем:
Подставим теперь значение  , тогда:
, тогда:
При решении многих задач, связанных с вычислением кинетической энергии, бывает полезно абсолютное движение системы по отношению к неподвижным осям  (рис. 329) представить в виде двух движений — переносного поступательного вместе с центром инерции С, или, что то же, вместе с осями
(рис. 329) представить в виде двух движений — переносного поступательного вместе с центром инерции С, или, что то же, вместе с осями  , движущимися параллельно осям Oxyz, и относительного движения вокруг центра инерции С, т. е. по отношению к осям .
, движущимися параллельно осям Oxyz, и относительного движения вокруг центра инерции С, т. е. по отношению к осям .
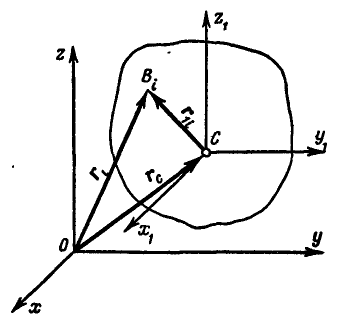
Рис. 329.
Пусть положения центра инерции С и какой-либо точки системы  по отношению к осям Oxyz определяются радиусами-векторами
по отношению к осям Oxyz определяются радиусами-векторами  , а положение точки по отношению к осям радиусом-вектором
, а положение точки по отношению к осям радиусом-вектором  . Тогда имеем:
. Тогда имеем: 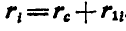
Беря производную по времени от обеих частей равенства, найдем  или
или  , где
, где  —относительная скорость точки
—относительная скорость точки  по отношению к осям
по отношению к осям  или, что то же, к центру инерции С.
или, что то же, к центру инерции С.
Так как кинетическая энергия системы будет:

то, подставляя вместо  , найденное значение, получим:
, найденное значение, получим:
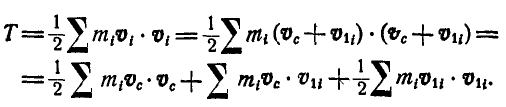
Покажем, что

Действительно, применим равенство (179,а) по отношению к осям  тогда
тогда
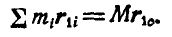
Но так как  , то
, то
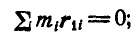
следовательно:

а также

Окончательно имеем:

Следовательно, кинетическая энергия системы равна сумме кинетической энергии центра инерции в предположении, что в нем сосредоточена масса всей системы и кинетической энергии в ее относительном движении по отношению к поступательно движущимся осям координат с началом в центре инерции.
В этом заключается теорема Кенига.
Большое количество задач на применение последних двух общих теорем динамики будет приведено в следующей главе — «Динамика твердого тела».
| Рекомендую подробно изучить предмет: |
| Ещё лекции с примерами решения и объяснением: |
- Условие равновесия системы сходящихся сил в геометрической форме
- Условия равновесия системы сходящихся сил в аналитической форме
- Приведение двух параллельных сил к равнодействующей
- Пара сил в теоретической механике
- Аналитическая статика
- Теорема о движении центра инерции
- Теорема количества движения
- Теорема моментов количества движения